
AV4EV GoKart
An innovative spin on a favorite childhood activity… Driving GoKarts!!
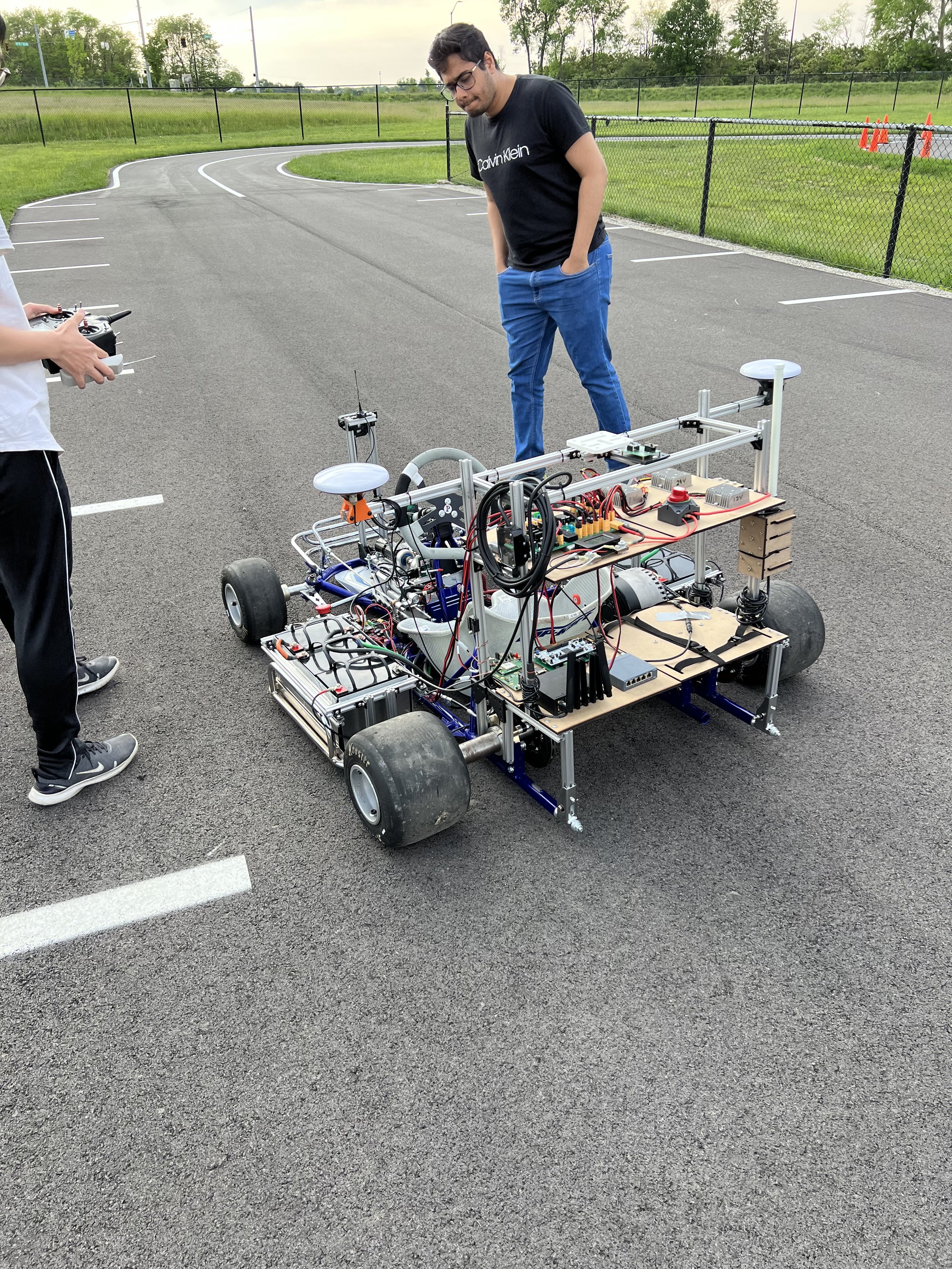
In collaboration with UPenn ESE Professor Rahul Mangharam, his lab xLab, and the global Autoware Foundation, my team and I designed, built, and actuated an autonomous electric GoKart. Starting with the standard manually-driven design from TopKart, we then took everything apart and strapped it up with autonomy features, including sensors, drivers, motors, microcontrollers, and much more. After rigorous unit testing and autonomy testing, we rented a minivan, and packaged the entire product on an 11 hour journey to Purdue University in Indiana, where we competed in the 2023 AKS Grad Prix against 5 other universities.
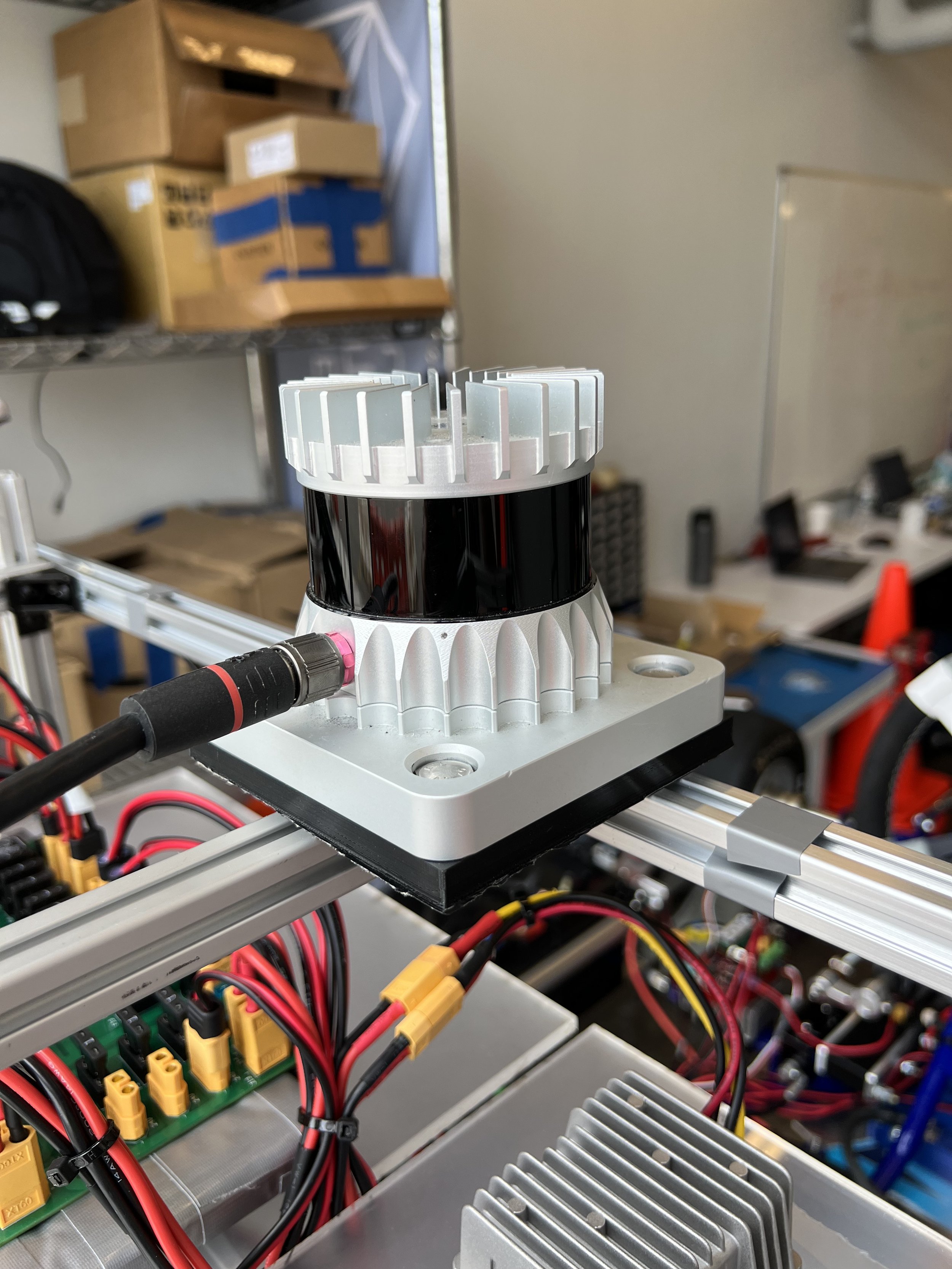
We raced in two challenges, including: (1) the Open Challenge where we used IMU data and GNSS localization to guide pure pursuit path following of pre-determined waypoints, and (2) the Reactive Challenge where we fused live sensory data from an OAK-D camera and Ouster LiDAR to identify and follow-the-gap between orange cone-marked lanes. We won both challenges, with times at around 7 minutes, to complete five laps, each of approximately 400 meter and 5 turns.
A central engineering priority throughout this project has been reproducibility. As such, we’ve made sure to document everything in GitHub, from successes to failures, from CAD files to PCB designs, from lower-level embedded to higher-level planning controls code, from one iteration to the next, from engineering decisions to empirical evidence. We build this GoKart not just to play around with, but to provide a research platform for various academic and corporate organizations with software that requires testing. Whereas small handheld (~1/10 scale) toy cars are cheap and affordable, and full-sized cars are ultimately most practical, our GoKart achieves the best of both worlds.


In order for a car to drive, someone’s gotta build it…
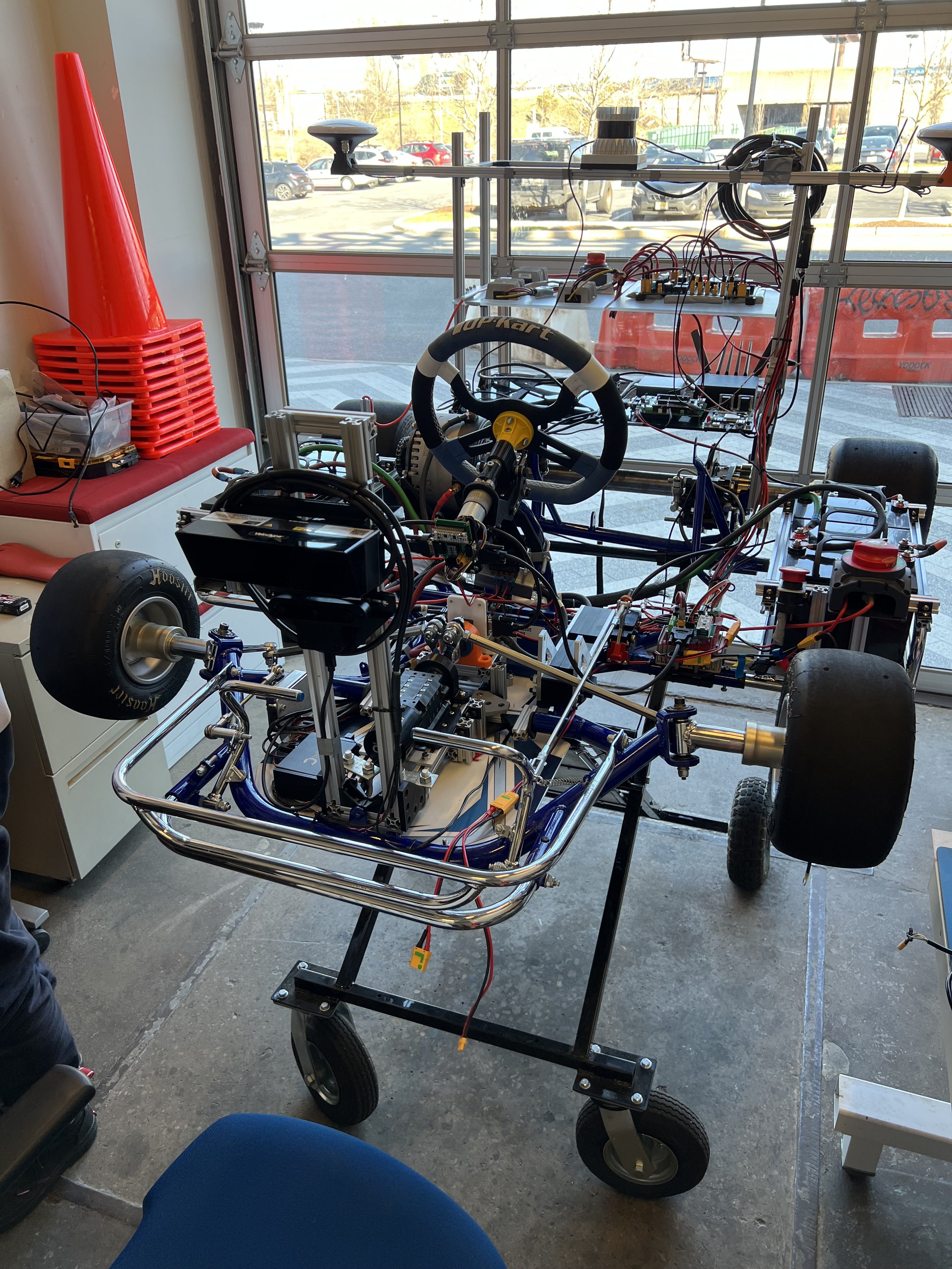
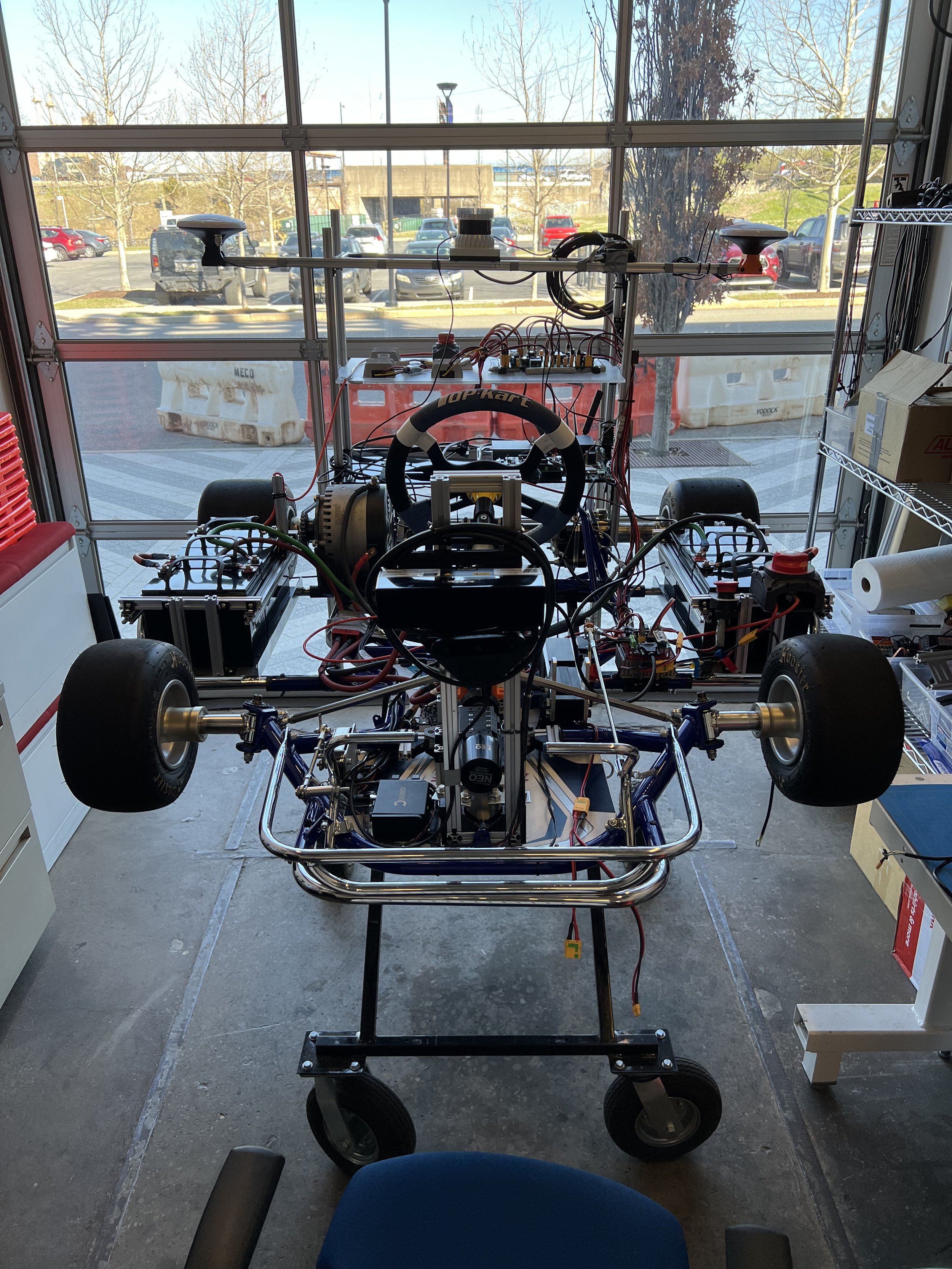
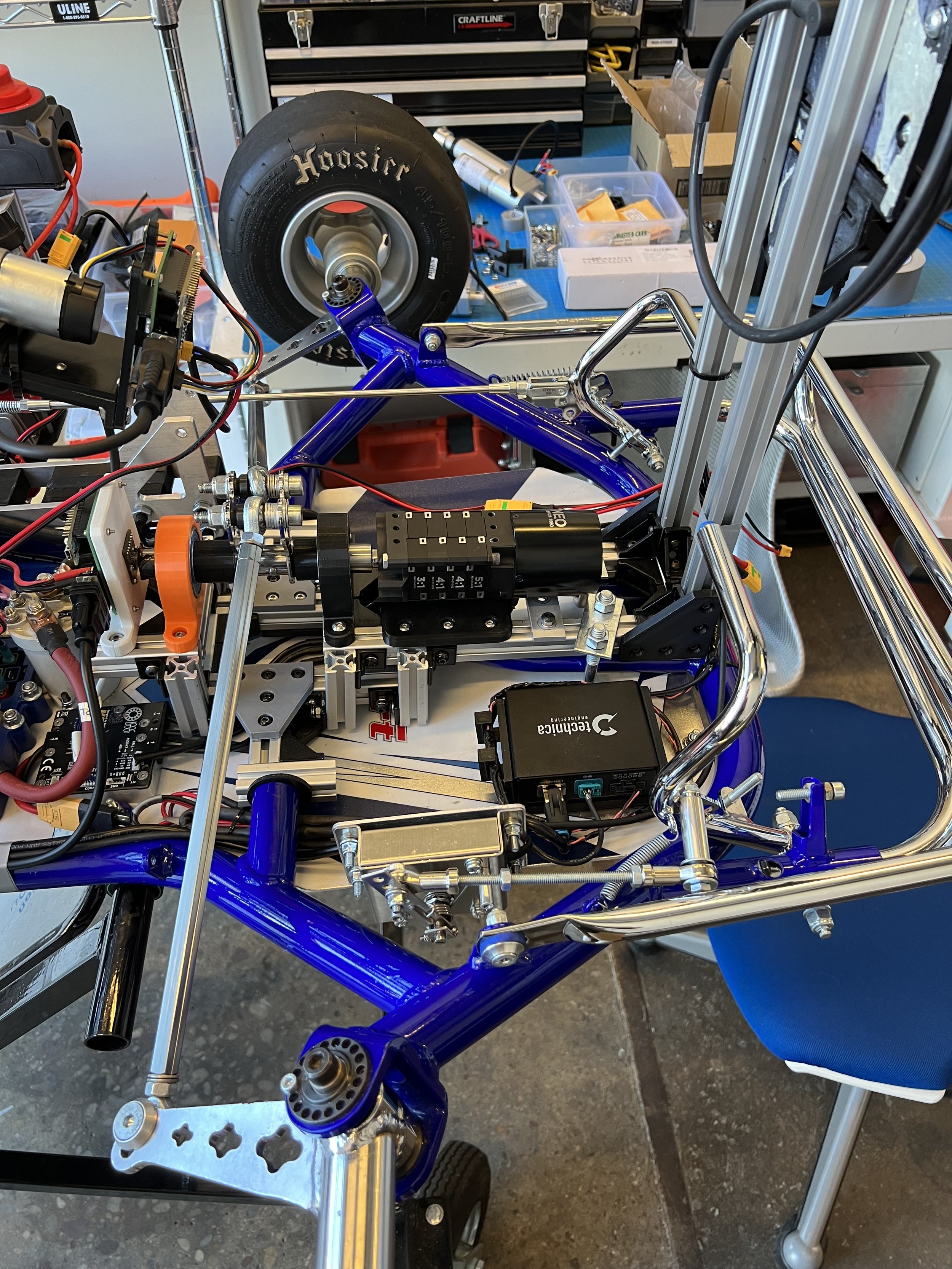
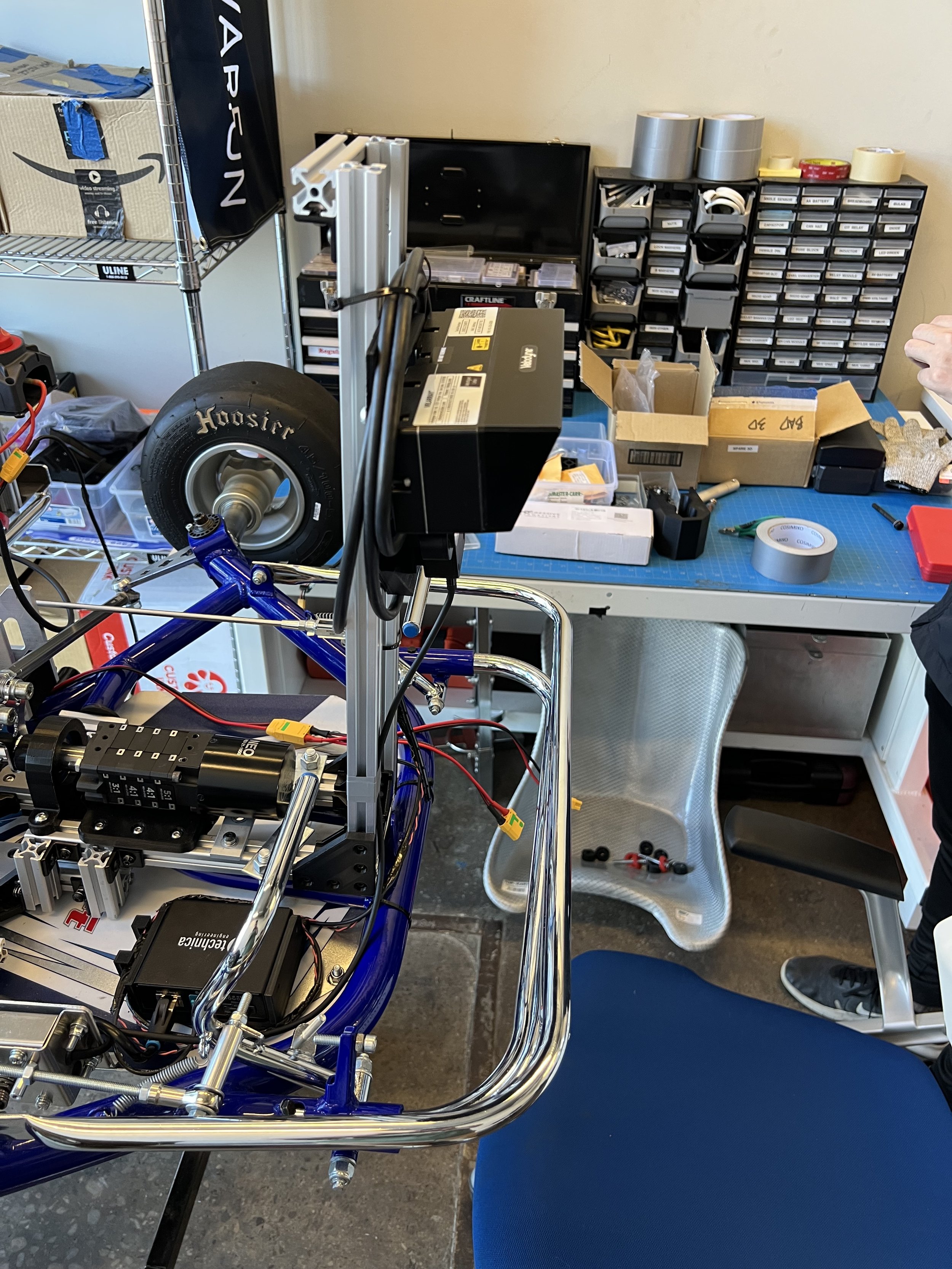
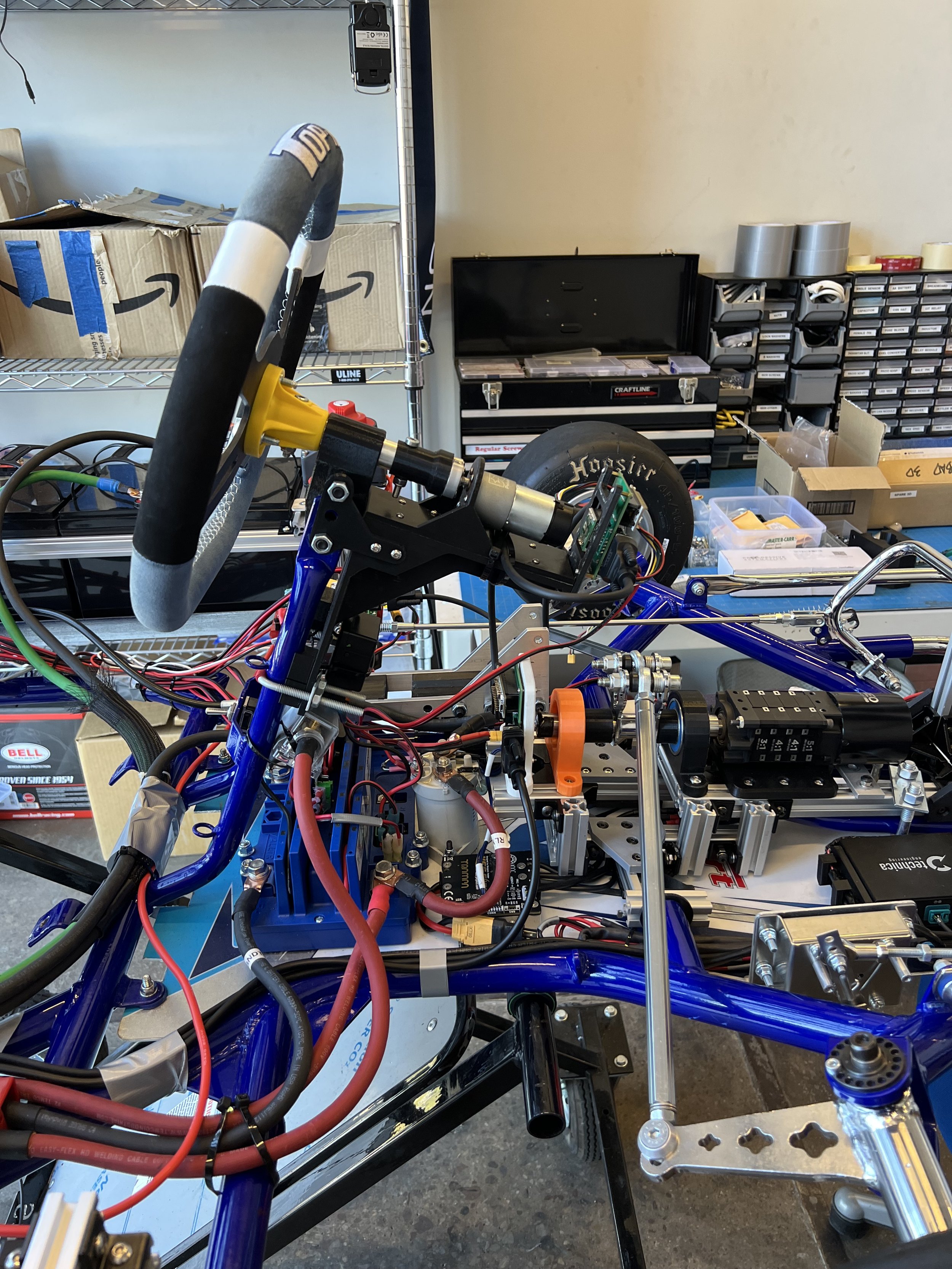
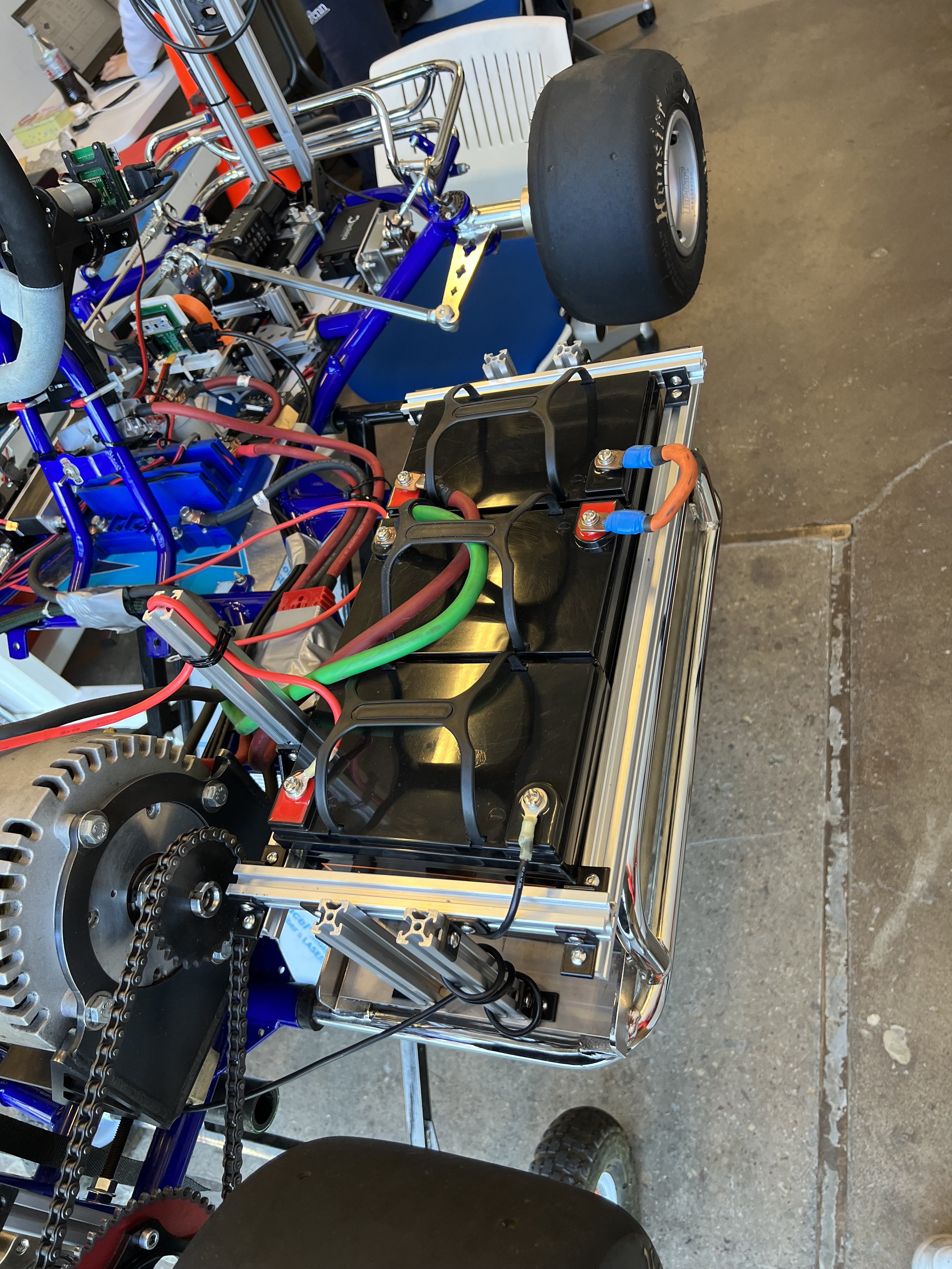
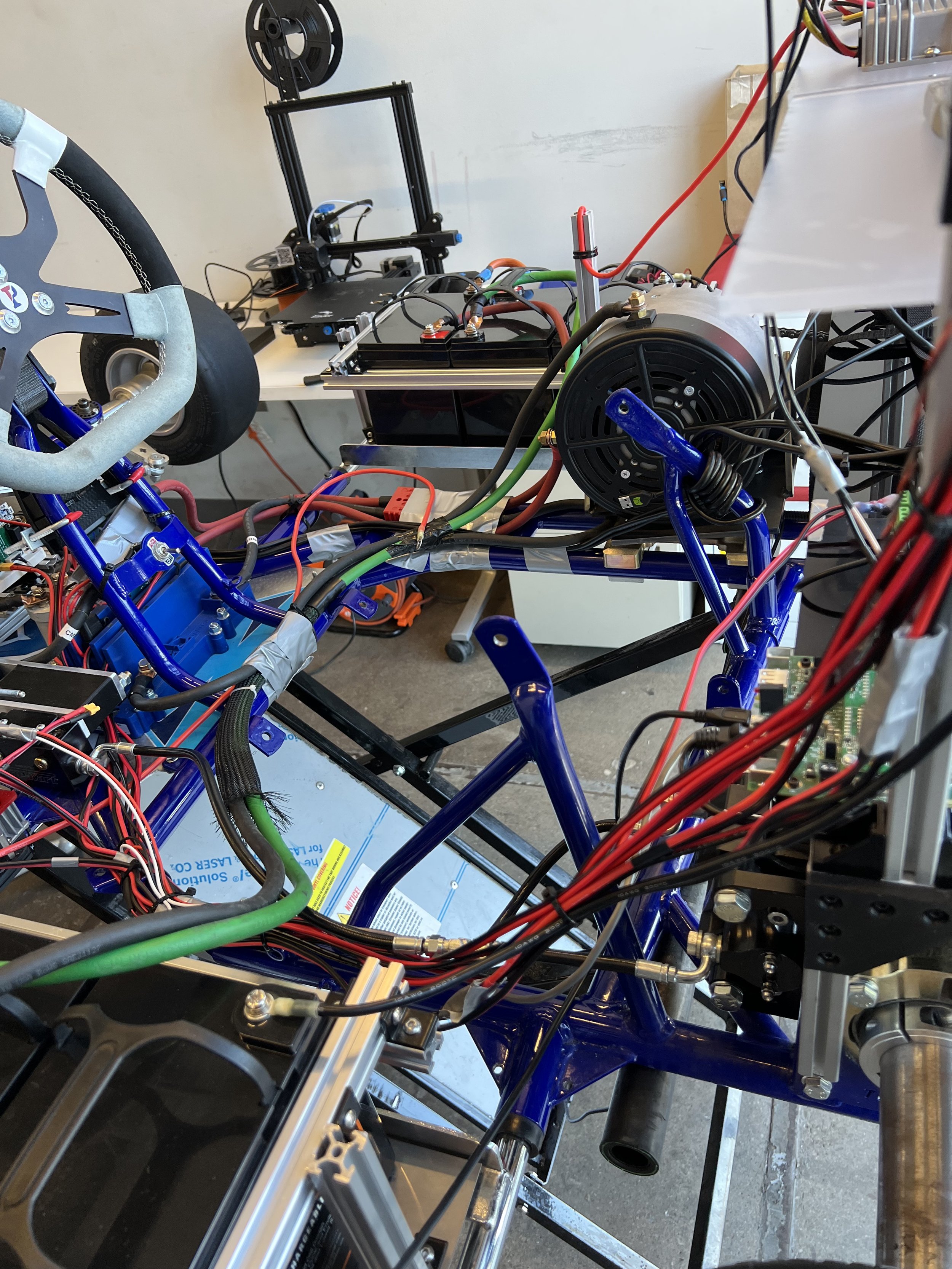
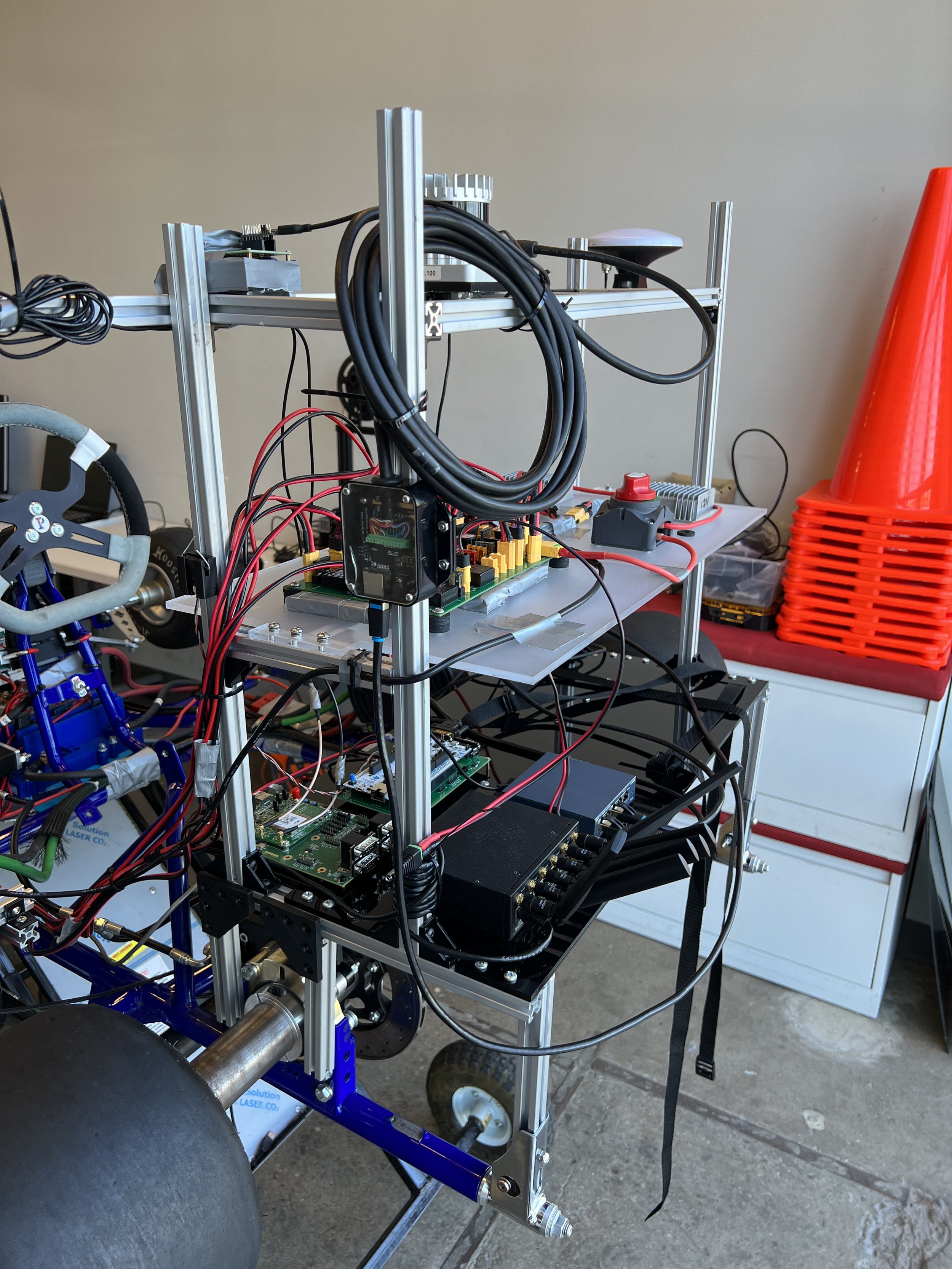
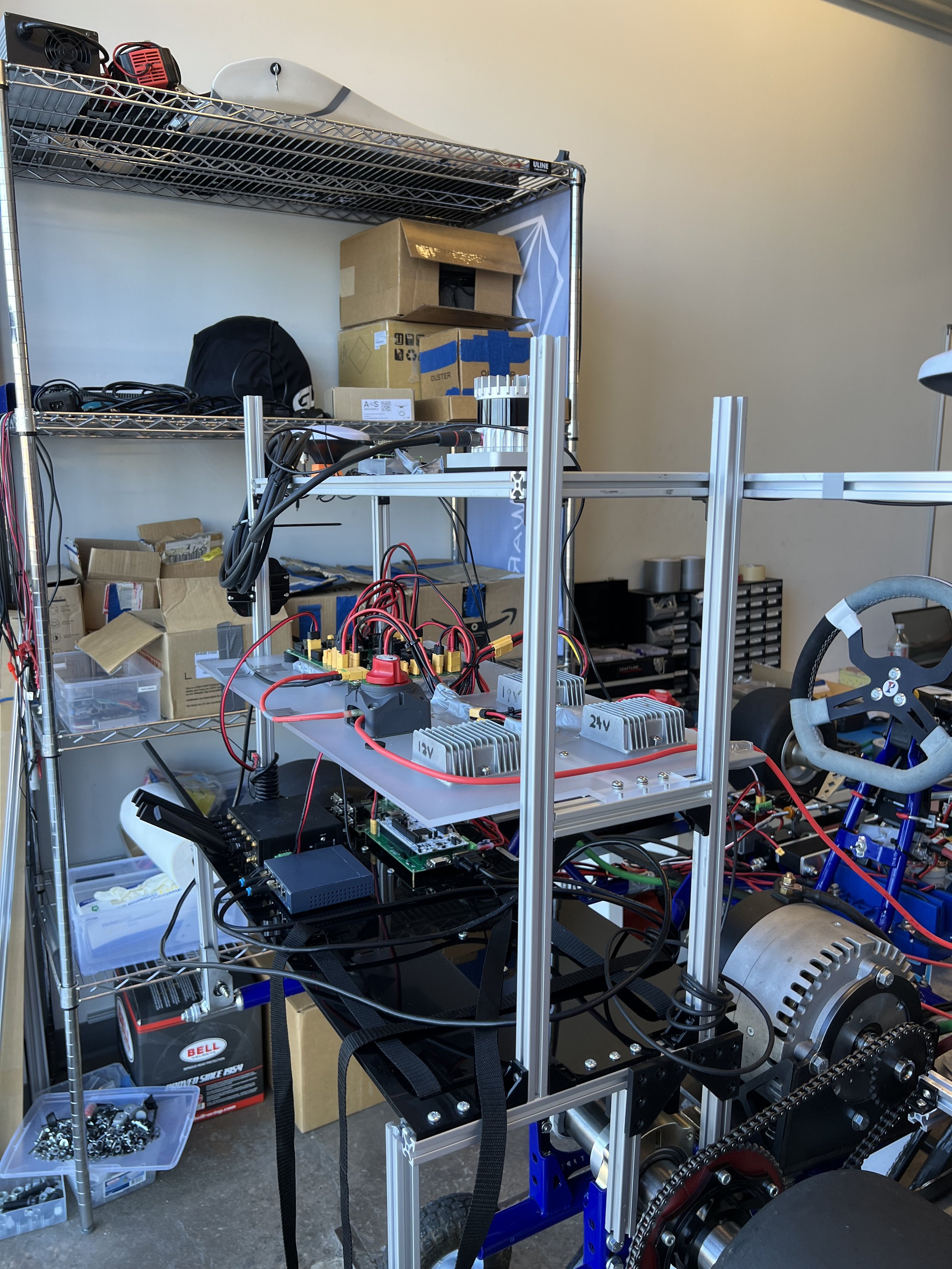
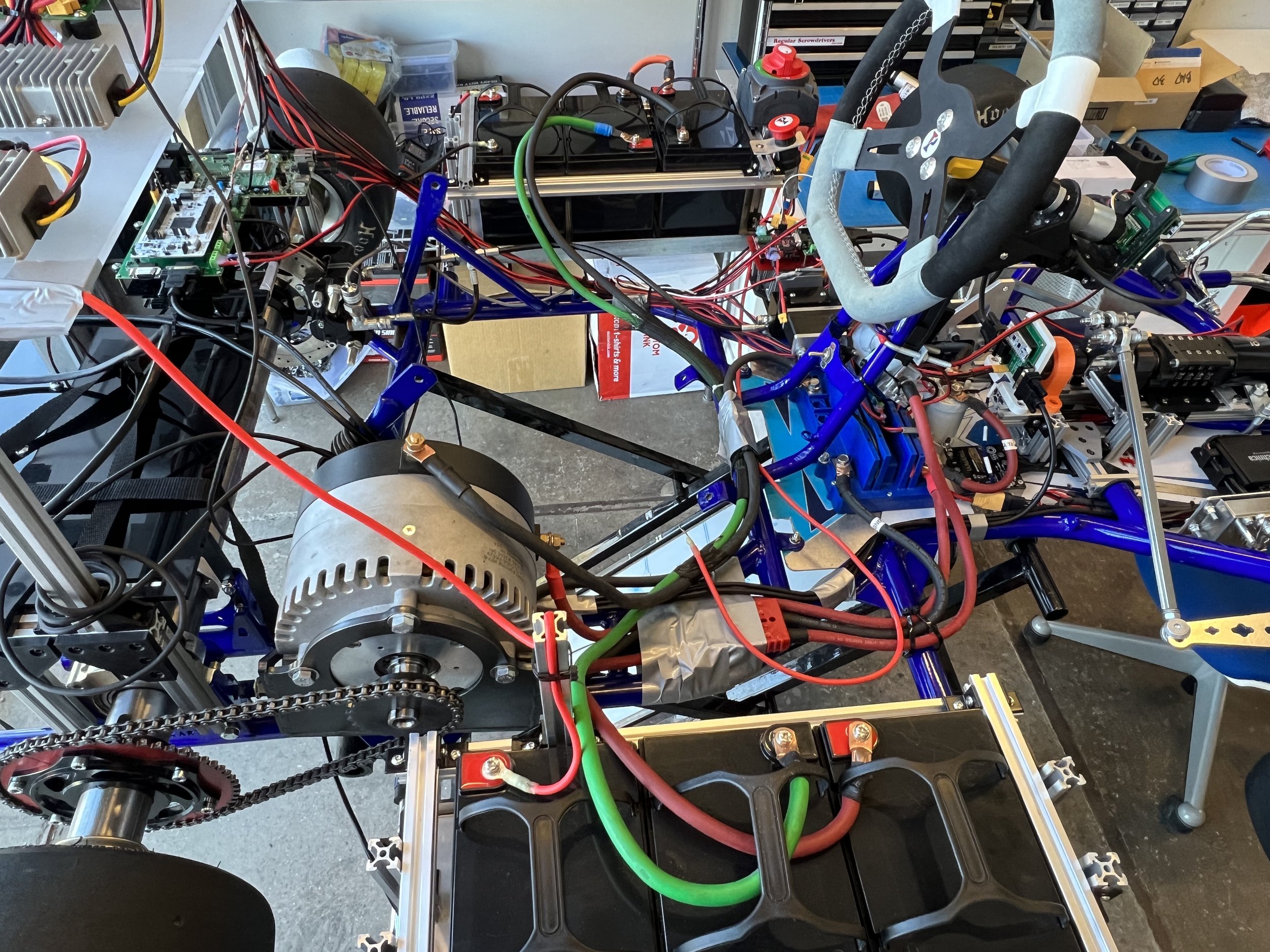
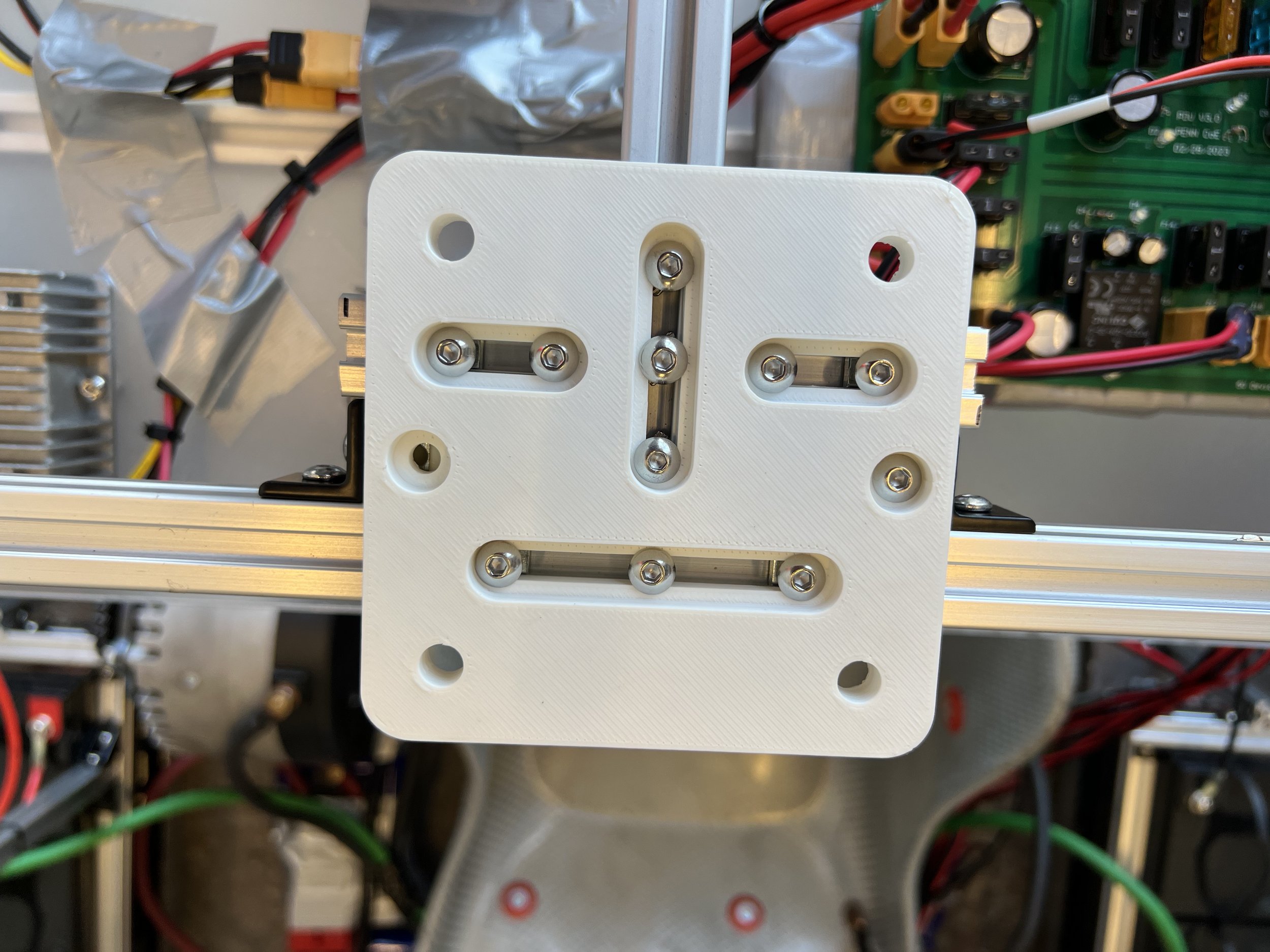
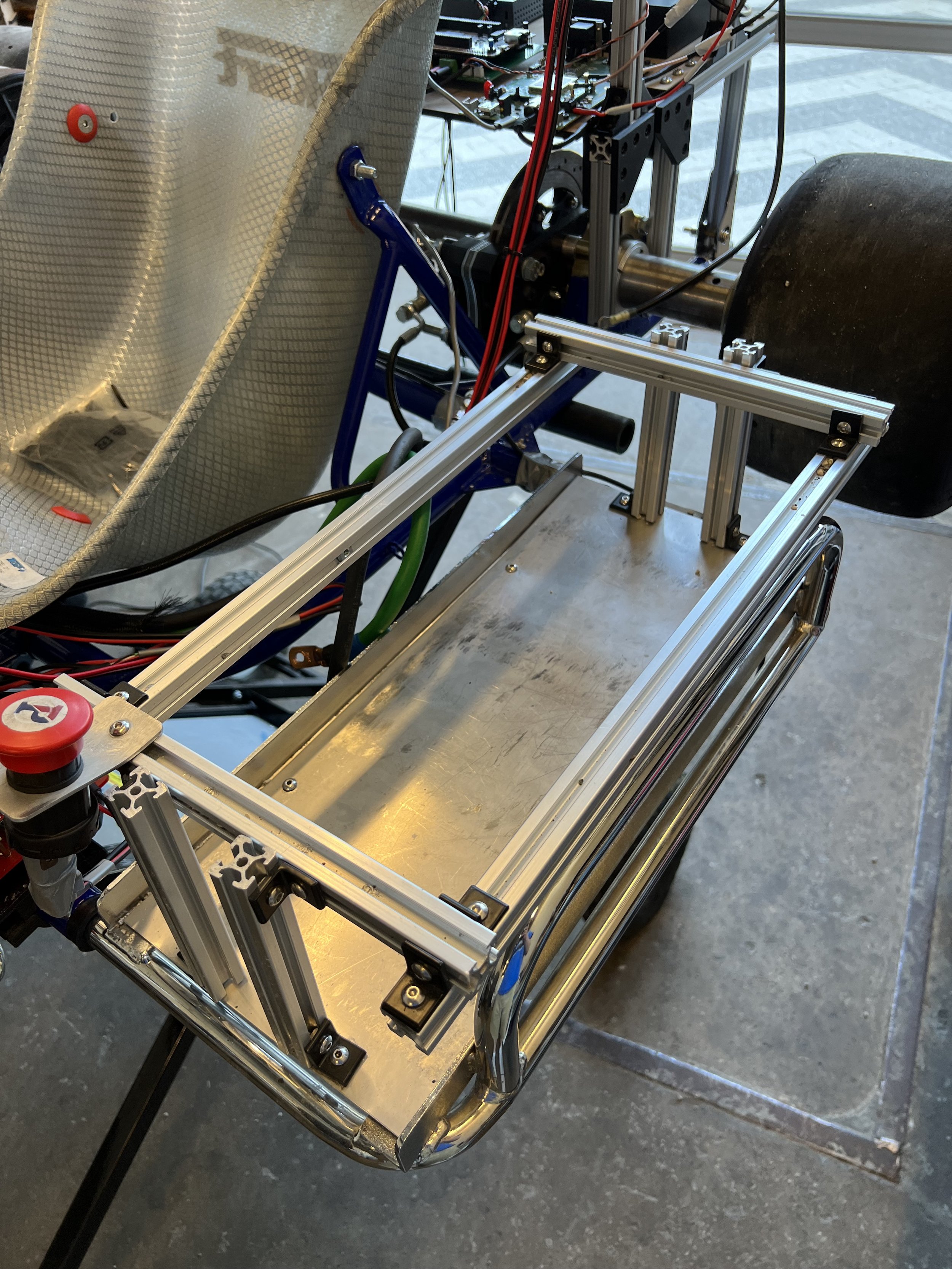
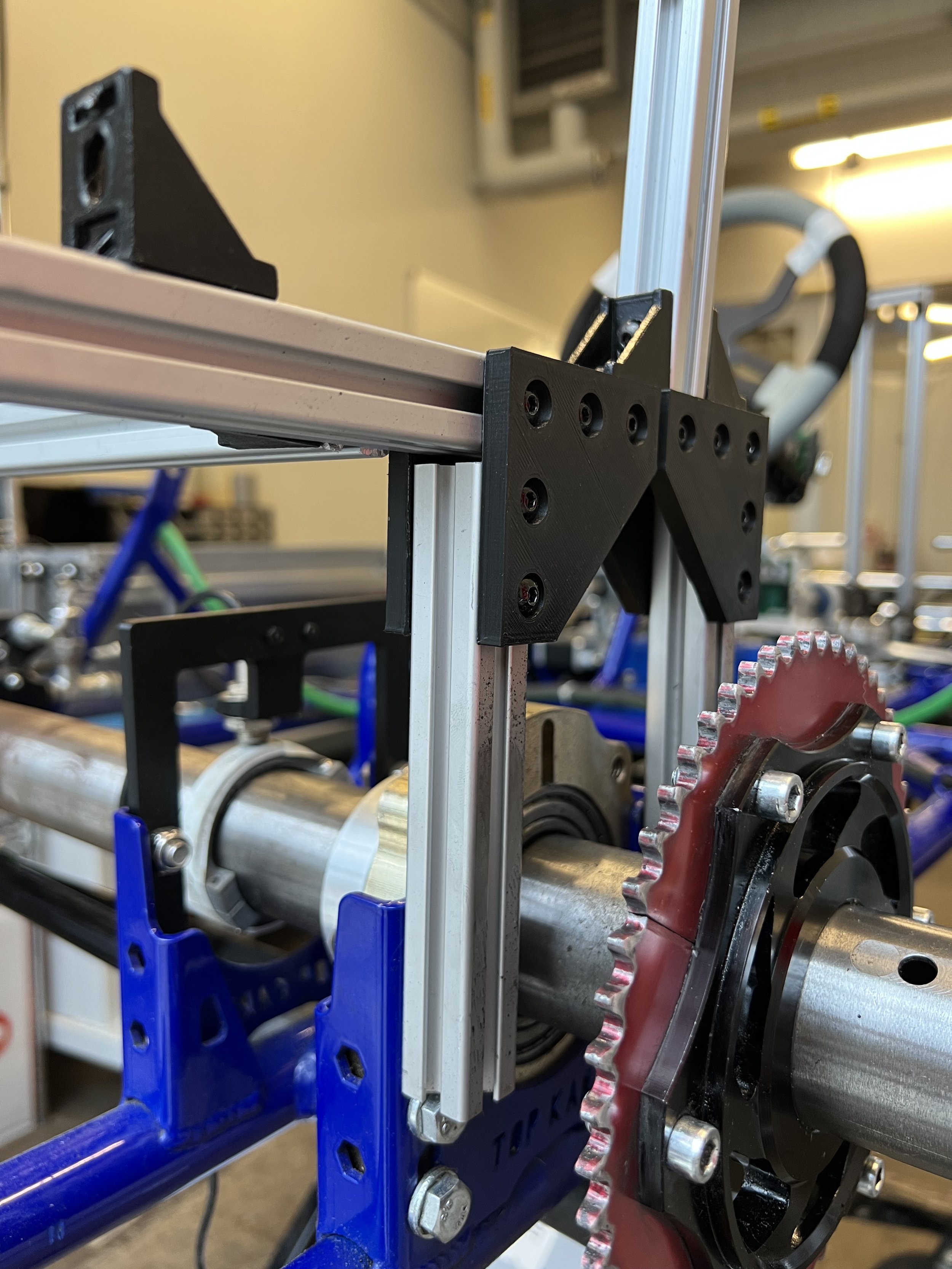
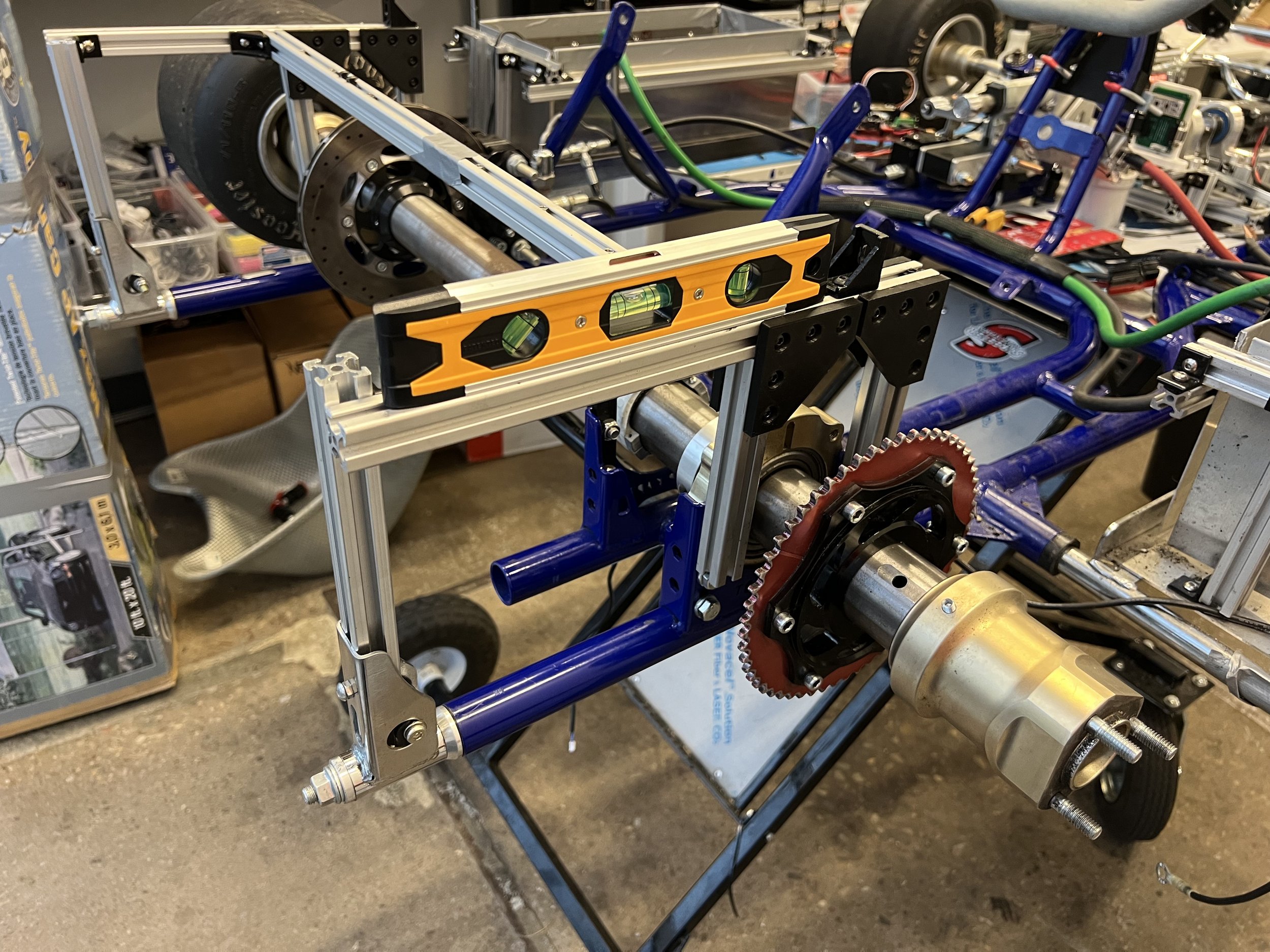
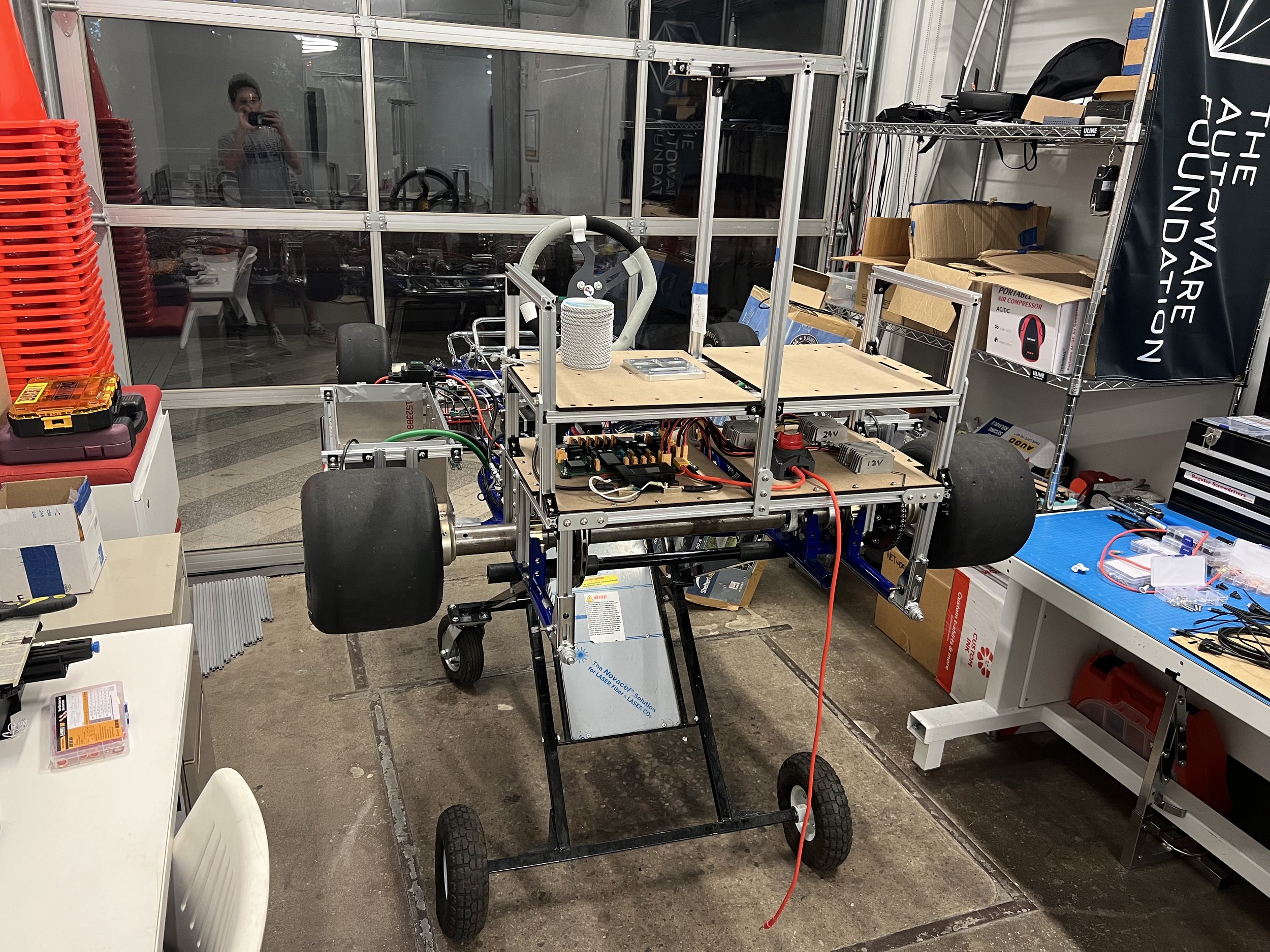
I contributed primarily on the mechanical and mechatronics side, that is, building the car and enabling its motion via electronics and lower level controls. We designed the car to optionally support three distinct drive modes: (1) Autonomous, (2) Remote human-controlled, and (3) Manual human-controlled. To allow for modes 1 & 2, all primary subsystems operate “by-Wire,” meaning they each receive commands and send feedback electrically via microcontroller (namely, an STM32 Nucleo), as opposed to mechanically from another subsystem or a human.
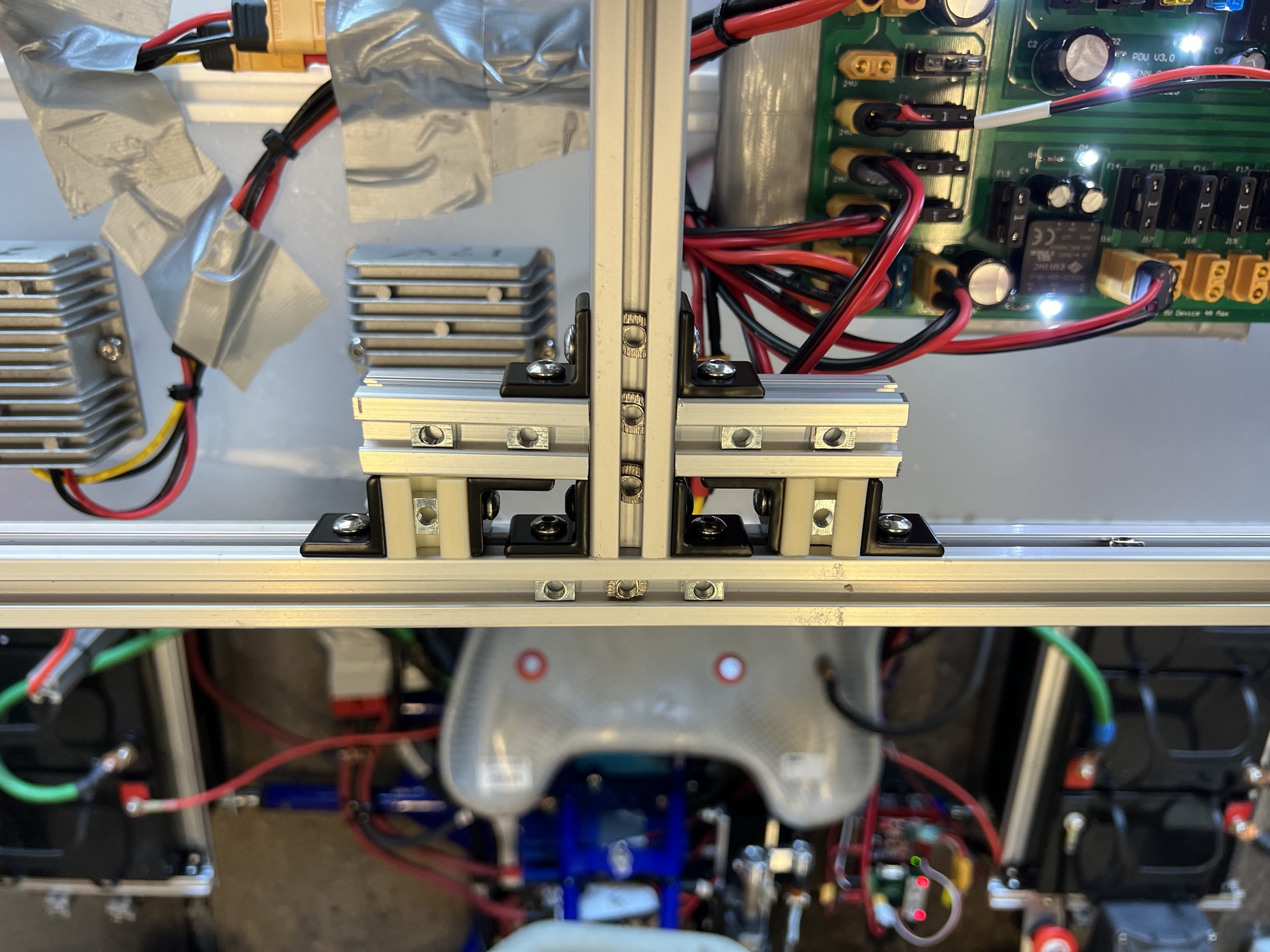
Our primary novel subsystems include: Throttle-by-Wire (for rear wheel drive), Lower Steer-by-Wire (for front wheel steering), Upper Steer-by-Wire (for human steering input, in mode 3), Brake-by-Wire (to decelerate), Rear Shelves (to house many electronics), and Battery Boxes (to house six 12 V LiPo batteries). The by-Wire mechanical systems must work precisely and collaboratively to carry out motion planning commands from a higher level planner/controller, thus each subsystem has its own local sensor to enable PID feedback control. Designing, building, testing, and integrating each subsystem was an iterative process which inherently wove together mechanical, electrical, and software considerations, not to mention economic and timeline engineering constraints. See the images below of the subsystems, and click the link below for a much more thorough walk-through of how we built the car, and how you can too!








Comprehensive Documentation
GitHub Repositories
IEEE Transactions on Intelligent Vehicles (T-IV) Journal
Autonomous Karting Series (AKS) Competition 2023
Purdue Grand Prix Track, West Lafayette, Indiana, Thursday May 18th
Shown below is the Reactive Challenge, relying on Computer Vision. Not shown is the Open Challenge, using a pre-existent track map.
We won 1st place in both categories, with similar average speeds. We took ~7 minutes to complete 5 laps, each of ~400m and 5 turns.
Safety21 Transportation Symposium 2023 - AV4EV Demo
Mill 19, Carnegie Mellon University, Pittsburgh, Pennsylvania, Thursday November 16th
Shown below is our AV4EV GoKart Demo, from the Safety21 University Transportation Center Deployment Partner Consortium Symposium
We verbally explained the kart’s motivation, mechanics, and methodology, then proceeded to demonstrate the remote-controlled version