Chess
Motivated by origami cranes and also basketball players…
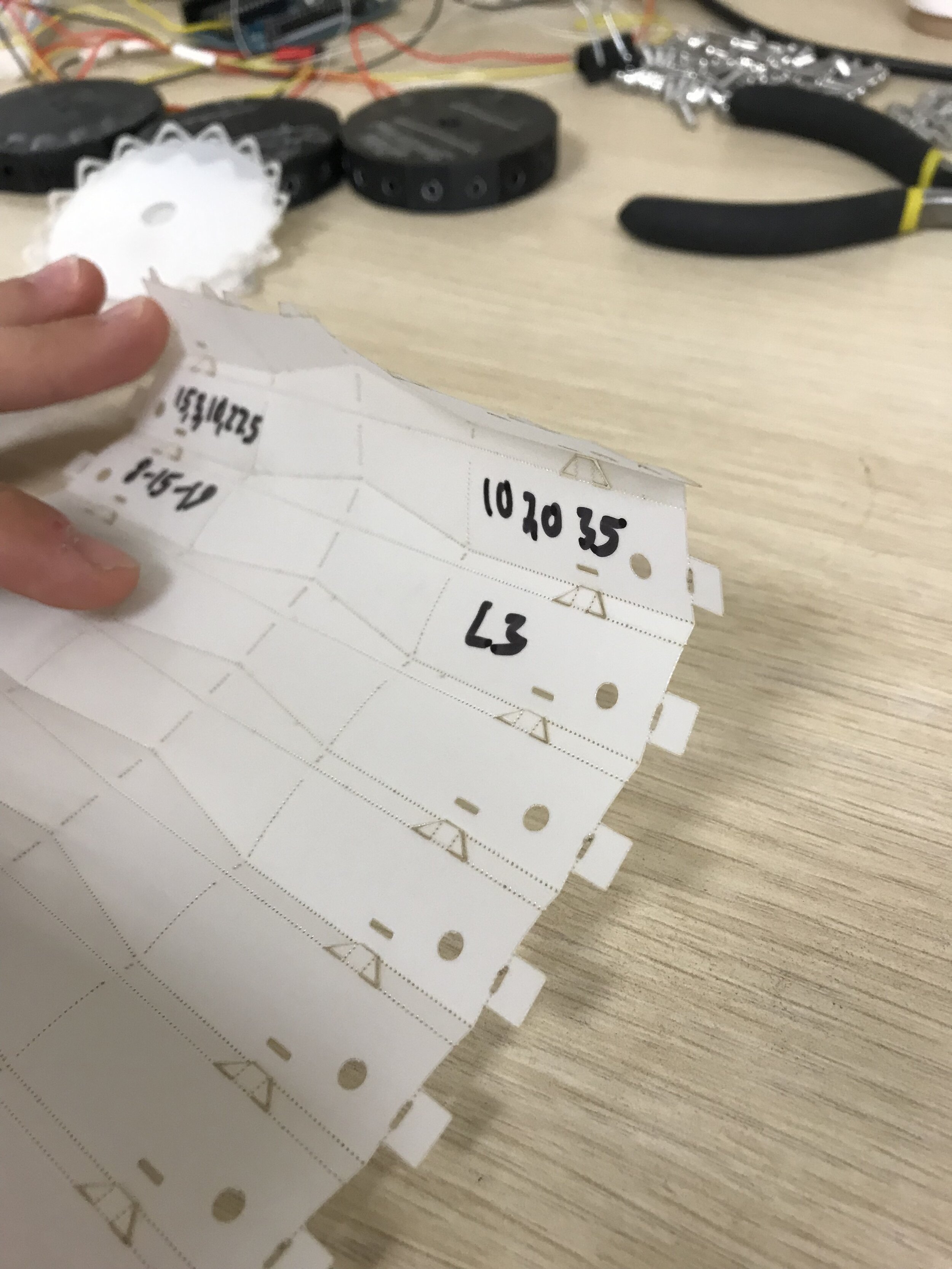
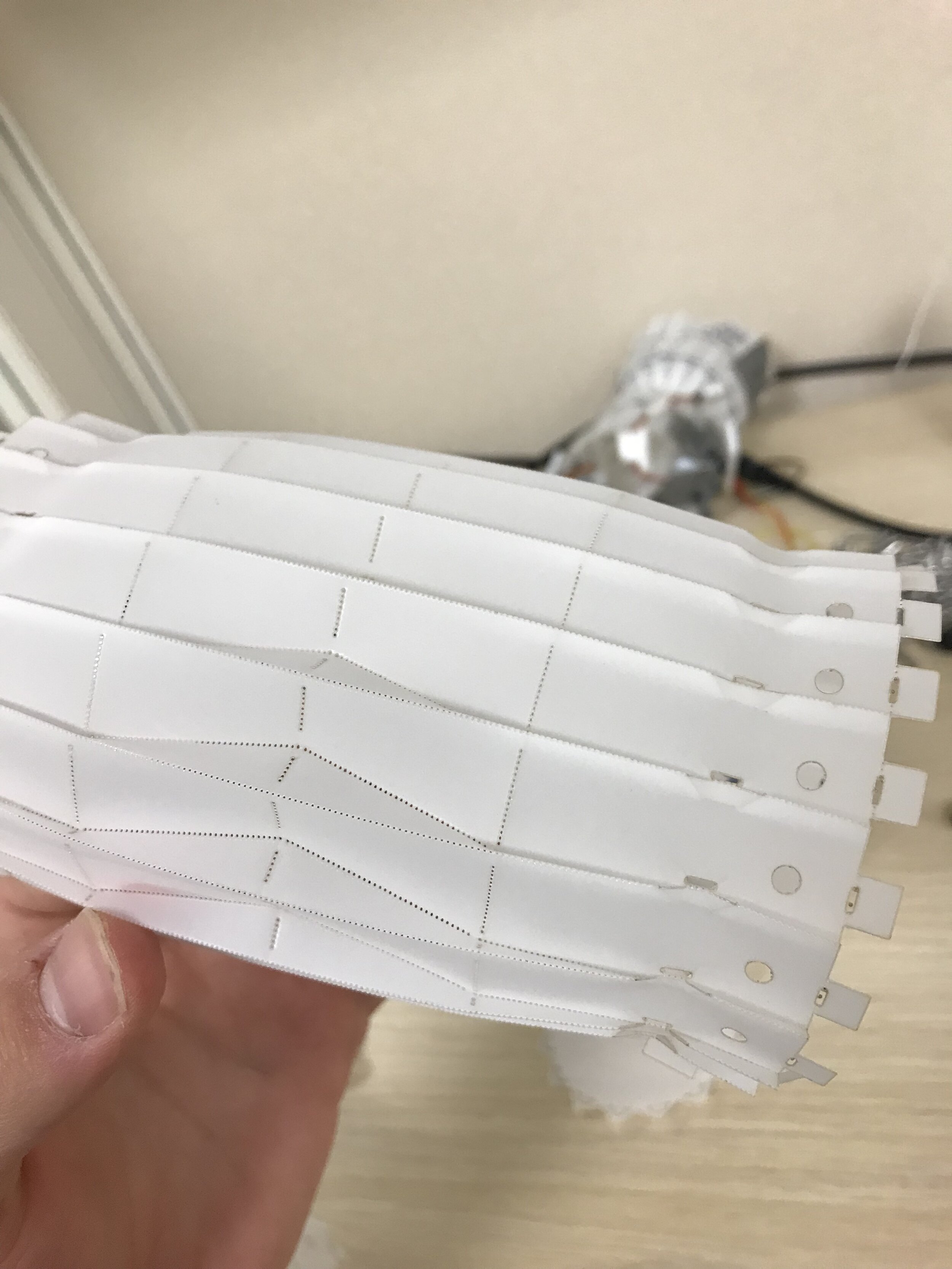
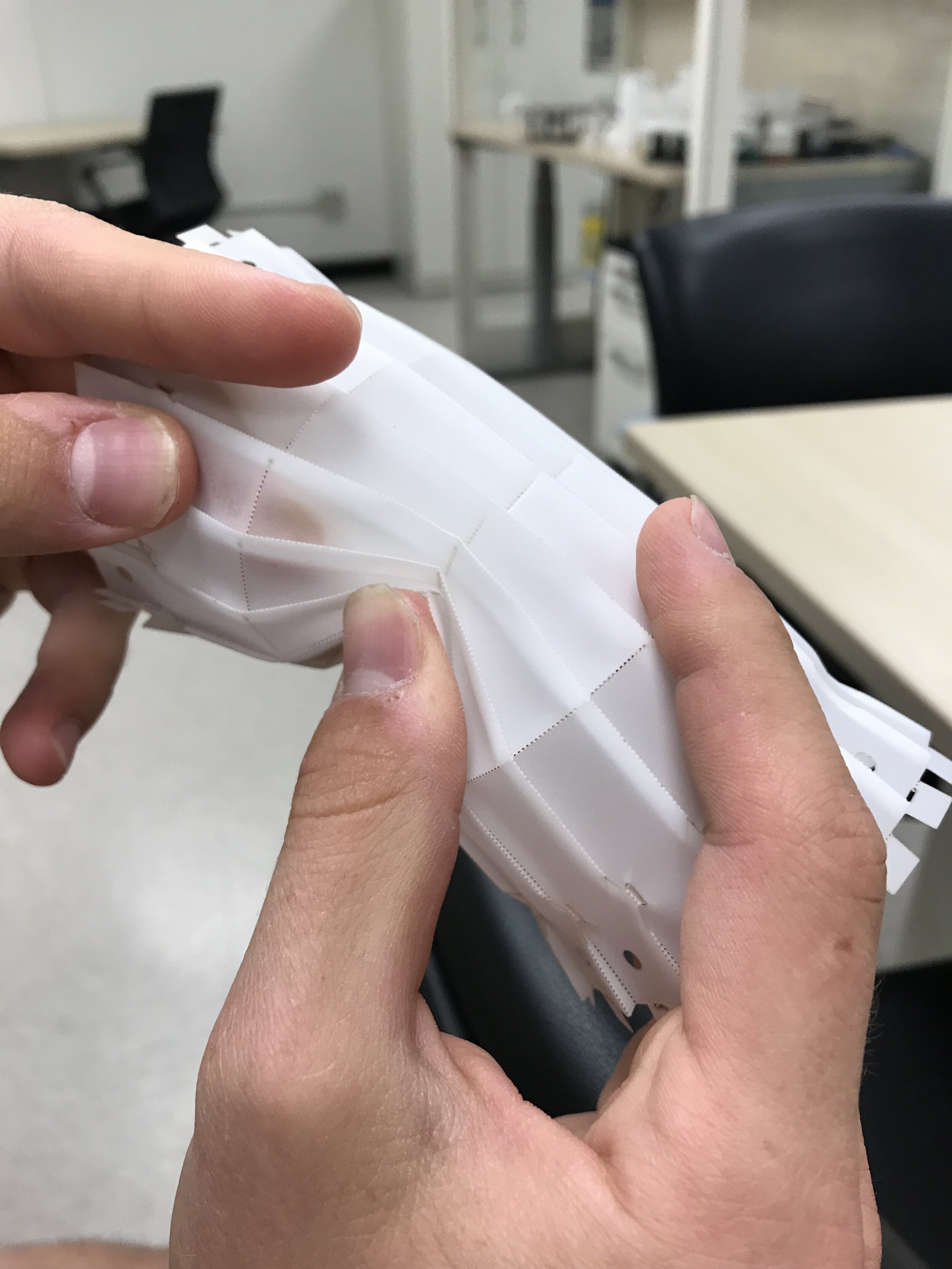
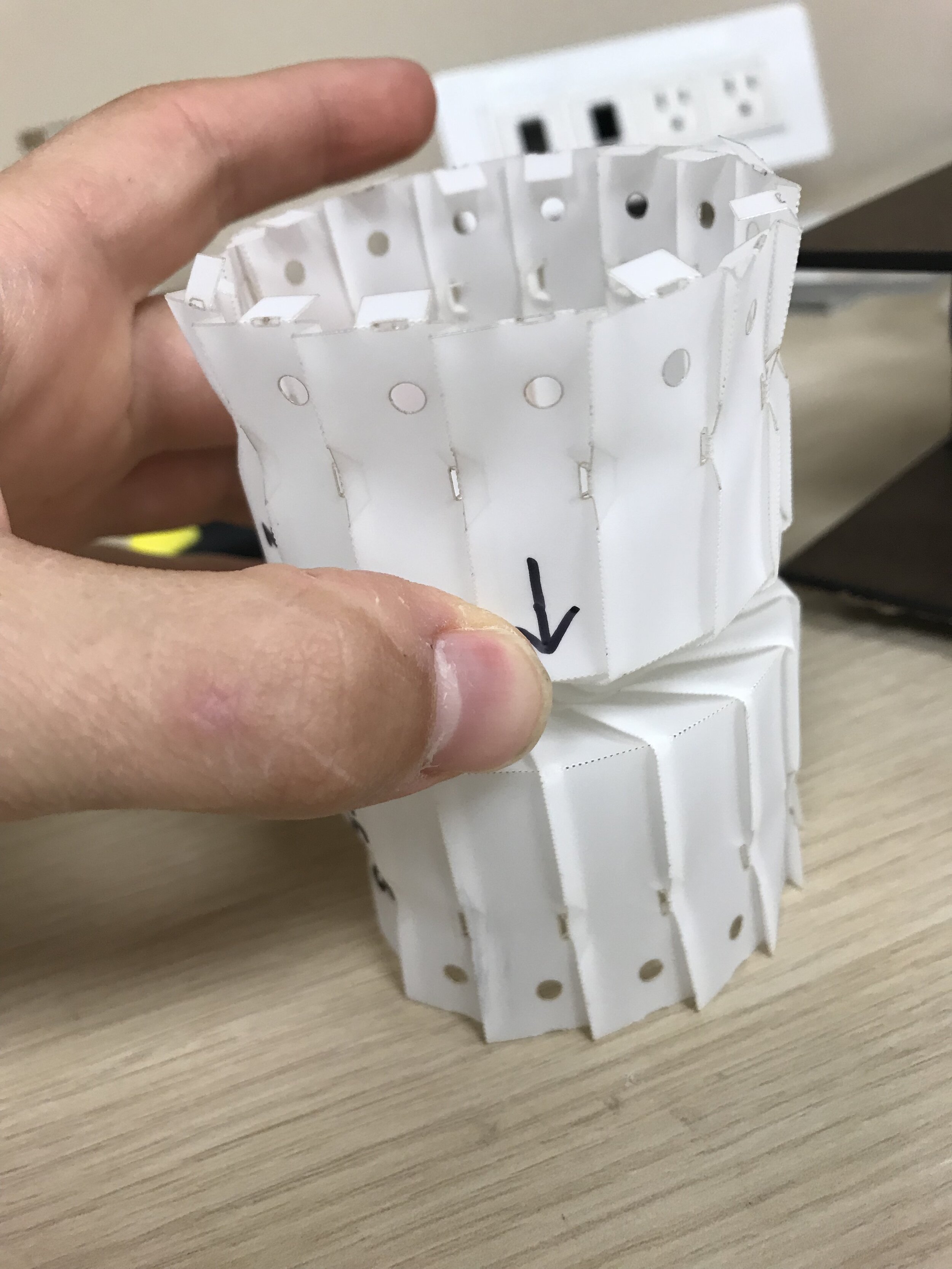
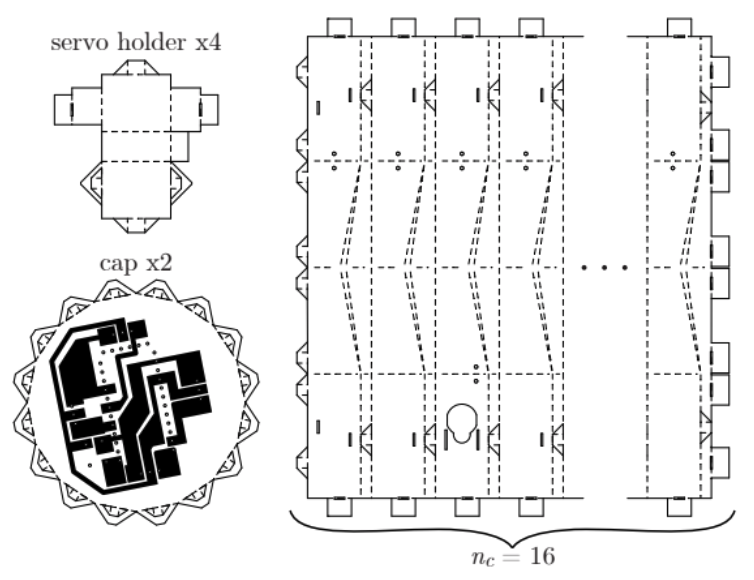
Through Sung Robotics Lab, I worked with Dr. Cynthia Sung and Jaimie Carlson to develop an origami robot that stores spring-like energy directly in its folds, which upon careful compression and release can translate into jumping a height larger than its own. Starting with the 2D REBO tessellation pattern, I meticulously tuned the laser cutting and geometric design parameters before perforating the design onto a thin sheet of Mylar, and subsequently folding the pattern by hand into its 3D configuration. Iterating over several prototypes allowed me to validate and refine the design, as well as plan and perform tests to gather sufficient data for analysis, including both MTS Instron compression/tension and Vicon motion capture. Using these testing results we created a pseudo-rigid-body model, working for arbitrary 2D input geometry and thus allowing optimization of 3D jump height.

Leveraging the folds themselves…
Our design demonstrates bistability, snapping between two states: expanded and compressed. As such, no actuation is required for the jump itself, but rather, simply to compress and quickly release the robot. I designed, 3D printed, and tested a small timing mechanism to facilitate this motion by displacing a taut string with connections on both of the robot’s sections. I then wrote an Arduino script actuating the rotation of these 4 “horns” by attaching them to servo motors controlled by an Arduino Pro Mini, both connected to the main robot body using only additional lightweight origami Mylar parts. In the end, we published a paper on the project, REBOund: Untethered Origami Jumping Robot with Controllable Jump Height (linked below), to ICRA 2020 Robotics Conference
ICRA 2020 Publication





Testing & Data Collection

MTS Instron Testing
I rigged up, planned, and performed Instron experiments over a geometric parameter sweep of REBOund robots, collecting force-displacement data during constant-velocity compressive and tensile tests. The results were then used to refine and validate our pseudo-rigid-body model.
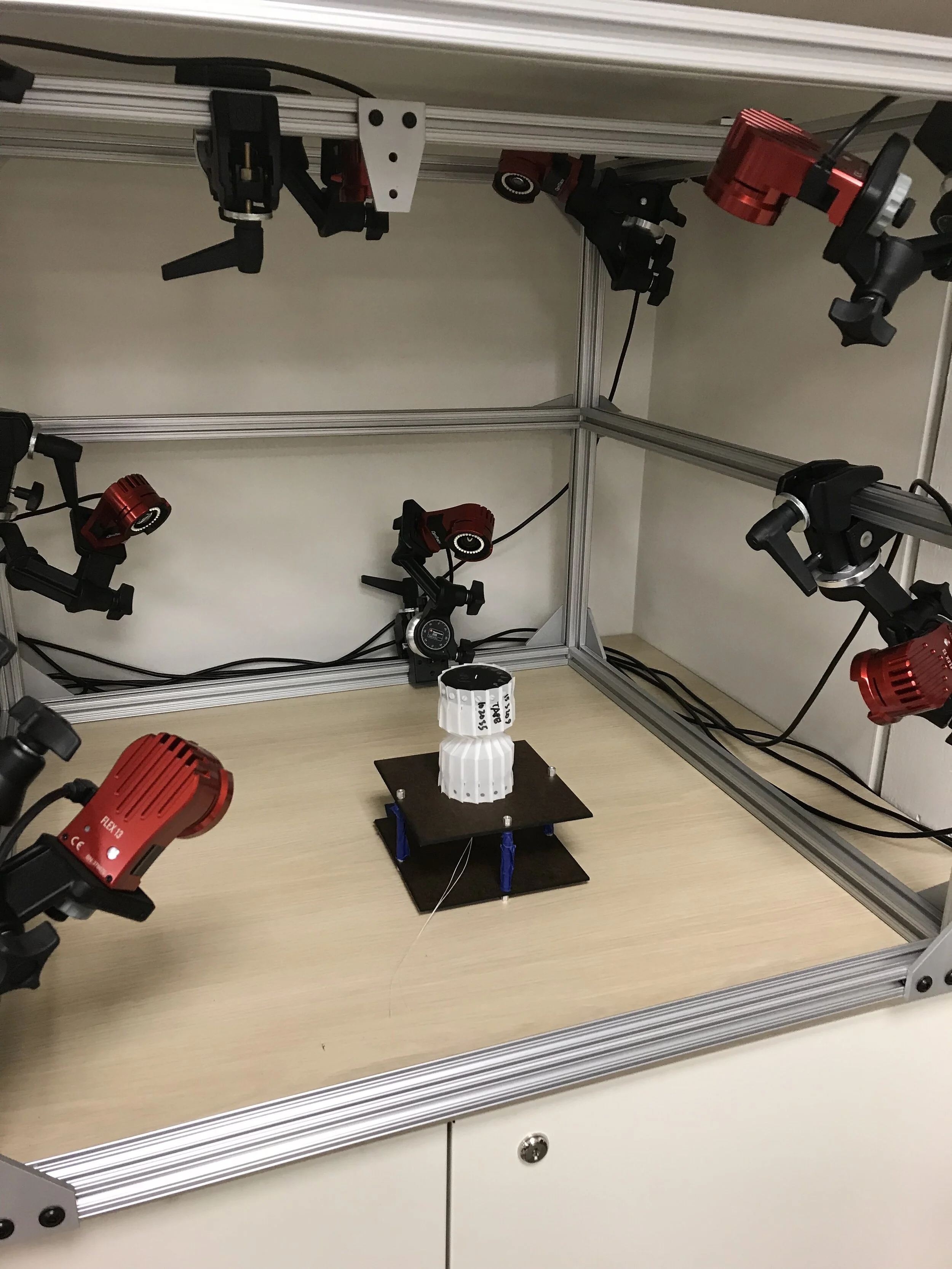
Vicon Motion Capture
I used Vicon hardware and software, including eight camera sensors as shown above, to track the trajectory of each REBOund robot throughout the course of a manually-actuated jump. The results were then compared to the model-predict jump height to verify robustness over arbitrary parameters.
Fabrication & Folding of Origami