Bistable Gripper
Using purely mechanical actuation…
Through Sung Robotics Lab, I worked primarily with Dr. Cynthia Sung and Jessica McWilliams to develop a compliant bistable robot that can grasp onto and enclose a wide variety of objects, initiated only by contact with the object itself. Our complex mechanism utilizes various unique features, including mechanical stops and angle multipliers among several others, to exhibit snap-through behavior between two bistable equilibrium states: open and closed. Furthermore, the state transitions in either direction can be actuated with a single external downward force, as demonstrated by our displacement-controlled MTS testing. In the end, we published a paper on the project, Push-On Push-Off: A Compliant Bistable Gripper with Mechanical Sensing and Actuation (linked below), to the IEEE RoboSoft 2021 Robotics Conference.

Contributing virtually throughout COVID…
I used SolidWorks to iterate over candidate designs for individual 3D-printable mechanical components, including the central TPU spring component to initiate bistability through controlled stiffness, as well as PLA end effector claws capable of grabbing and holding the object. I then used MATLAB to develop a model for the system, robust to arbitrary dimensions across several design parameters, and subsequently plot a visual simulation of the dynamic motion (shown below). In determining the system’s state (i.e. relative positions, forces, etc.) throughout a full cycle, I first wrote and numerically solved the system’s governing physics equations under a quasi-static assumption, then relaxed that assumption by using a more precise energy-driven Lagrangian dynamics approach. I then used Principal Component Analysis to perform a constrained grid search, choosing the many system design variables to optimize over several practical considerations, including weight, range of graspable object geometries, and ease of snap-through. And when MATLAB took hours to run, I focused on reviewing relevant literature in compliant robotic grippers, and writing much of the paper’s Introduction section.
IEEE 2021 RoboSoft Publication
Push-On Push-Off: A Compliant Bistable Gripper with Mechanical Sensing and Actuation




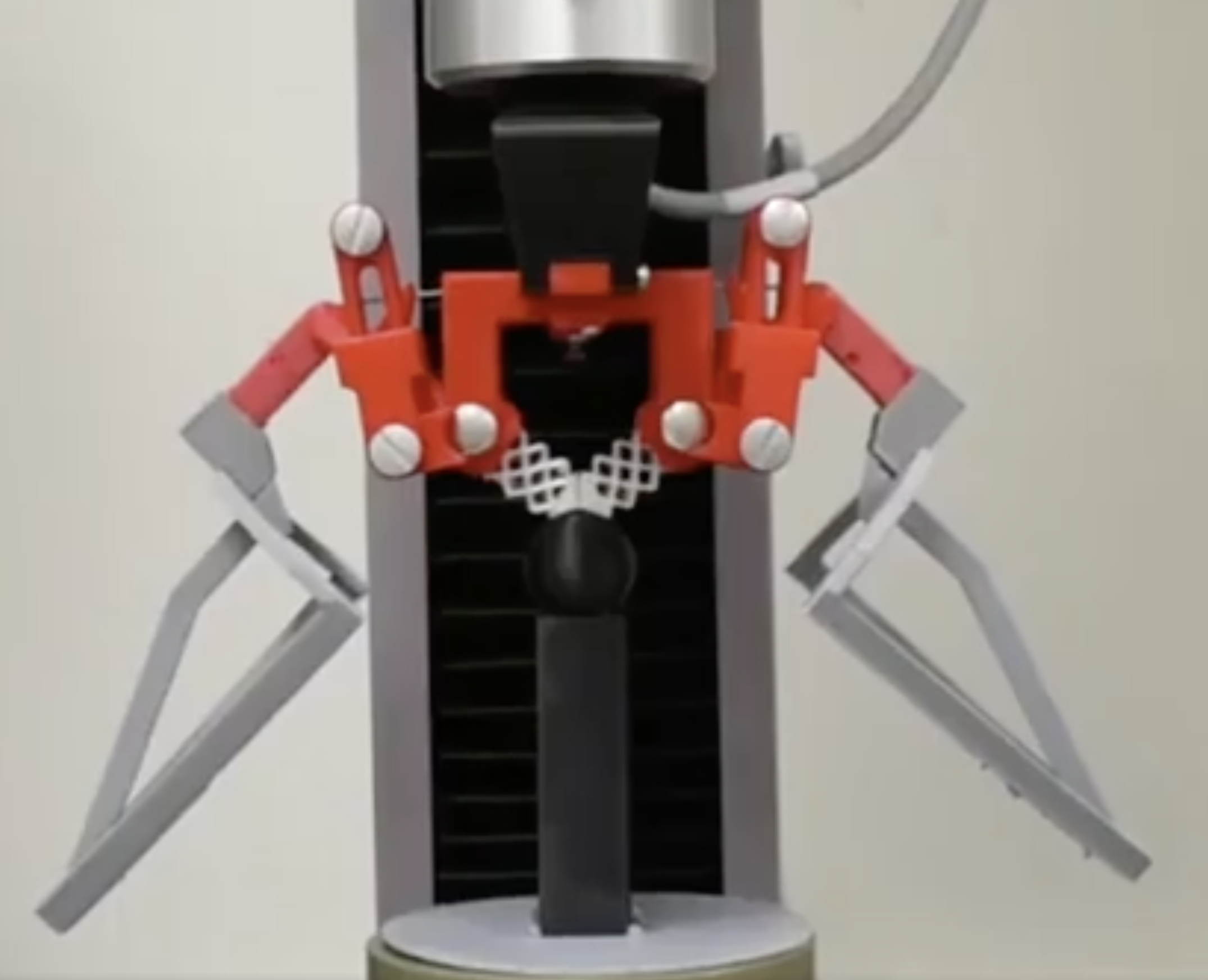
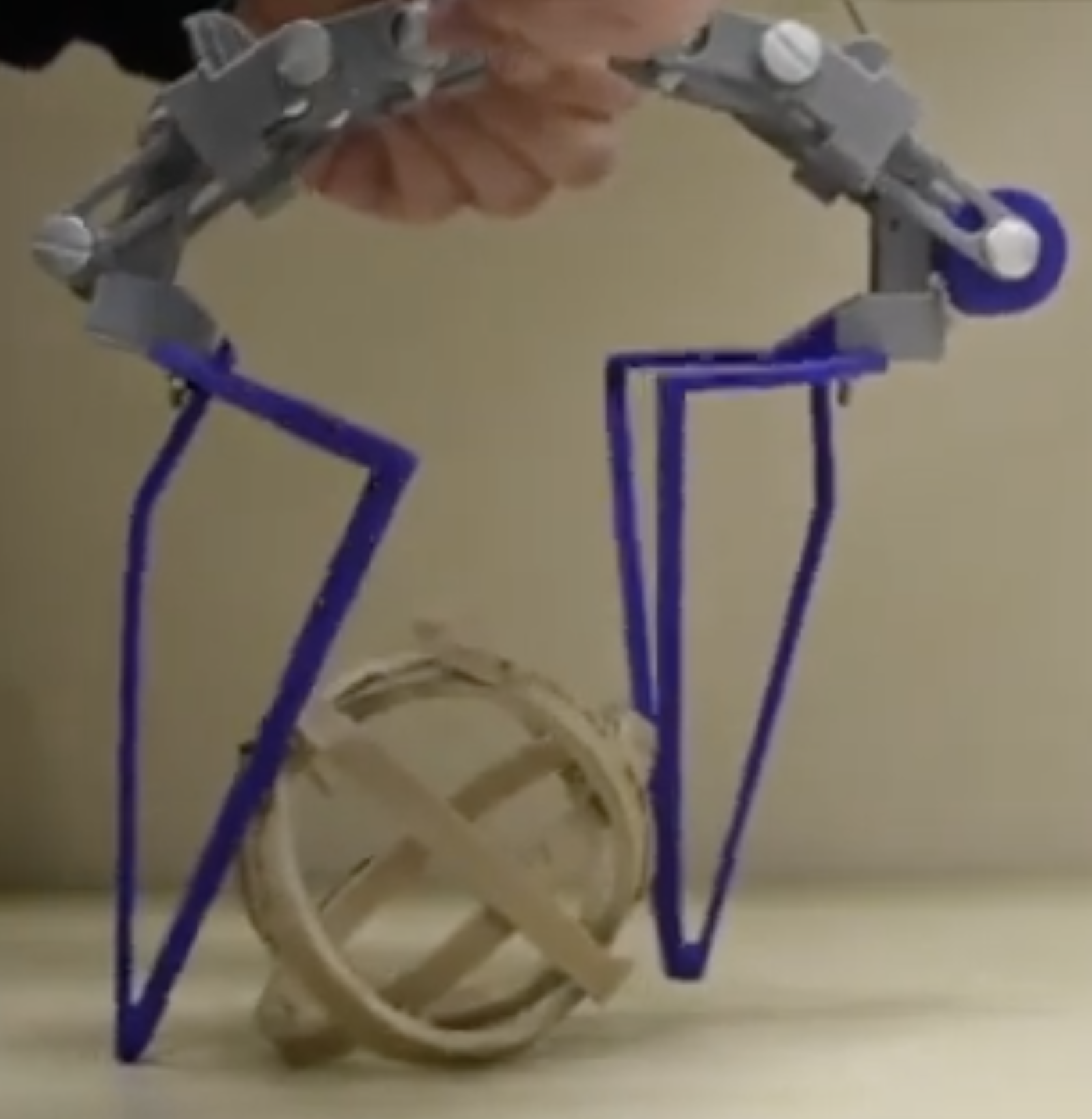
Testing and Application
Below are shown pictures of (1) MTS Instron testing to collect force-displacement data (2) Applications including gripping of a Zyrtec container, a spherical ball, and a horizontal rod.



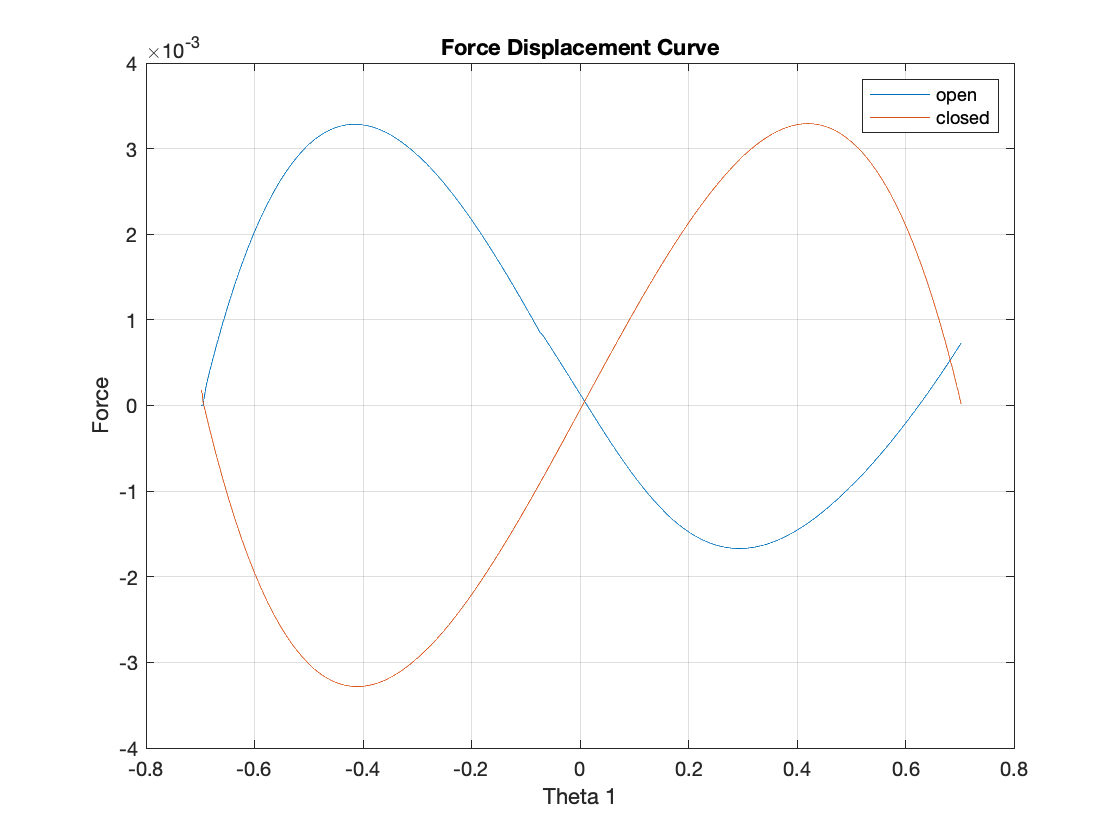
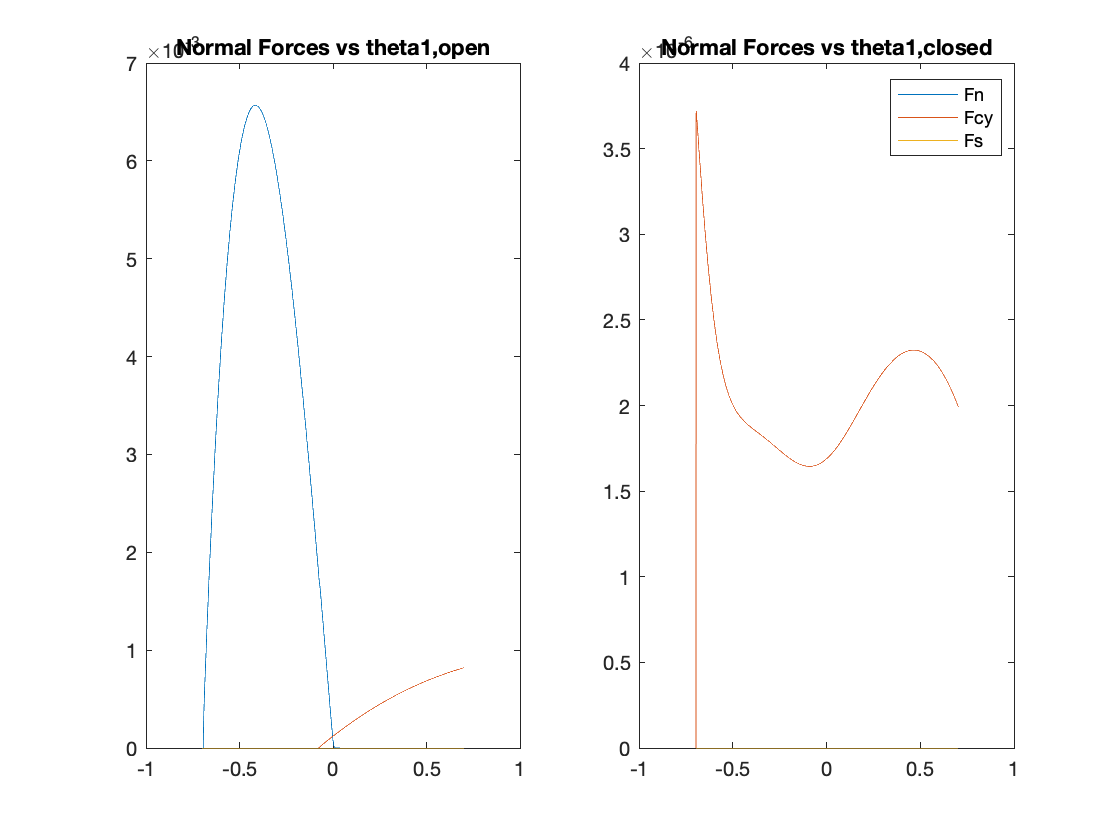
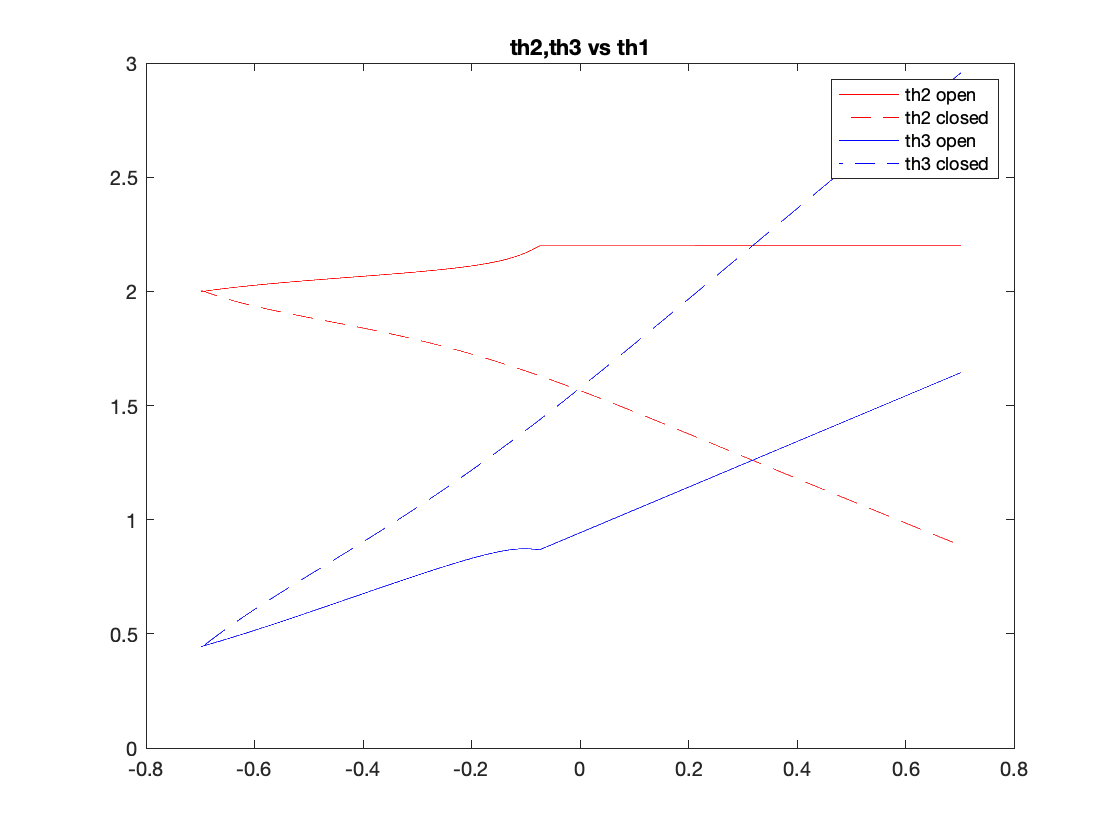
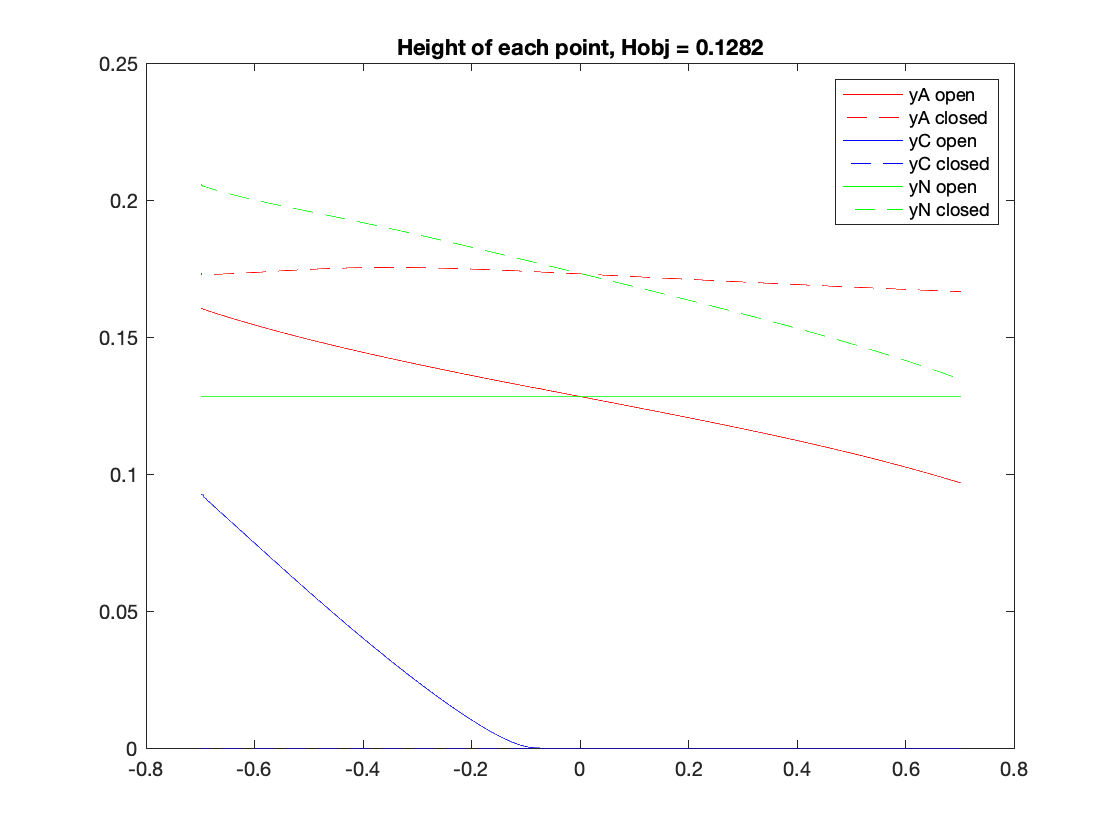
Preliminary Model: Simulation and Plots
Below are preliminary results I obtained from simulating the gripper through a full open-closed and closed-open cycle, under the quasi-static assumption. Iterating over theta1 (the central angle of linkage 1 with the horizontal) I generated the following simulation video and state plots. The force-displacement plot in particular was very important, as it predicted the collected MTS data, from the RoboSoft submission and shown above